
卷积神经网络共87篇 第7页
排序

快速点云处理,首选这款软件!
软件简介 Bentley Pointools是一款功能强大的工具包,用于编辑点云和创建点云交付成果,使用Bentley Pointools 能为您所有的基础设施项目处理点云。高性能点云引擎快速进行详图制作、以层为基础...

基于神经网络算法的TeamFree会议一体机降噪实战
原标题:基于神经网络算法的TeamFree会议一体机降噪实战在线会议、在线教育、直播等线上模式改变了办公、教育等行业的传统交互模式,成为时下新兴的刚需,原来小众领域的应用,正在向更广泛的领域...
关于激光点云逆向建模
随着上世纪九十年代,三维激光扫描技术的出现,点云概念开始被提及。 点云是目标表面特性的海量点集合,点云越密集,反映的图像细节和信息就越多。 当我们利用三维激光扫描仪扫描某一建筑表面时...
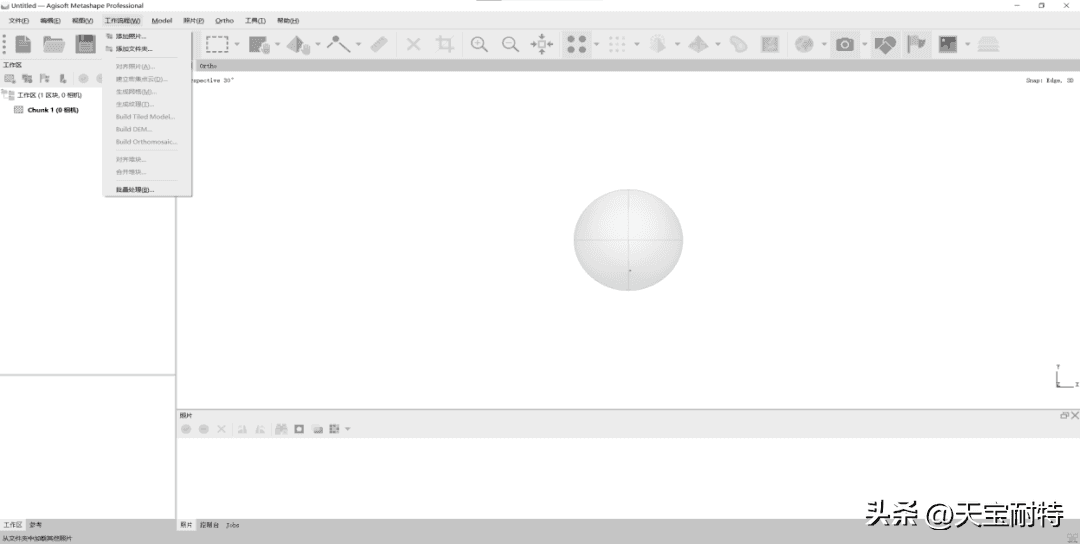
Photoscan、Pix4d、UASMaster、TBC无人机影像处理软件对比测评
前言导读: 无人机数据采集仅仅只是测绘工作流程中的第一个环节,如何快速处理影像数据?如何生成高质量的交付成果?高效、智能化的无人机影像处理软件逐渐成为行业重点关注之一,市面上也衍生...
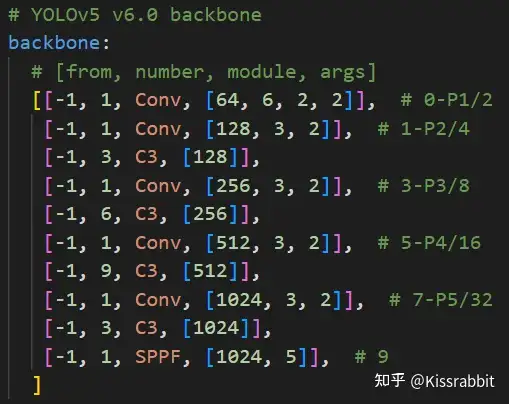
目标检测方法(目标检测怎么学)《目标检测》-第32章-浅析YOLOv8,
近期,YOLOv5原班人马推出了YOLO的最新SOTA——YOLOv8,在又一次刷新了YOLO系列的顶峰性能的同时,团队还重构了自YOLOv3和YOLOv5以来的代码风格,似乎不如先前简洁了,但据小道消息称,此次修改...
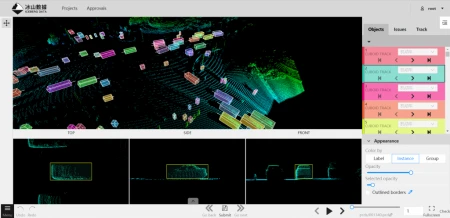
自动驾驶数据标注案例研究——3D 点云中的语义分割
3D点云语义分割和目标检测的区别 点云语义分割和点云目标检测都是处理三维点云数据的任务,但它们的目标和方法不同。 点云语义分割的目标是将点云中的每个点分配到一些预定义的语义类别中,例如...
我的面板

看一看
北大校友“炼丹”分享:OpenAI如何训练千亿级模型?
编译 | 琰琰 大规模深度神经网络训练仍是一项艰巨的挑战,因为动辄百亿、千亿参数量的语言模型,需要更多的 GPU 内存和时间周期。这篇文章从如何多GPU训练大模型的角度,回顾了现有的并行训练范...

Kubernetes 真的很难吗?明星在资本面前有多卑微?杨颖被摸胸抱起,林更新被怒骂不敢回嘴
【CSDN 编者按】Kubernetes 提供了许多开箱即用的好东西,可以推进业务的发展。但这是否意味着,所有服务都要放到 Kubernetes 上运行?当然不是。 原文链接:https://rcwz.pl/2023-03-26-kubern...

对 kubeadm 进行故障排查
与任何程序一样,你可能会在安装或者运行 kubeadm 时遇到错误。 本文列举了一些常见的故障场景,并提供可帮助你理解和解决这些问题的步骤。如果你的问题未在下面列出,请执行以下步骤:如果你认...

从零开始创建一个区块链,看看区块链内部如何运作的
01做什么?在本文中,我们将分析区块链技术背后的关键概念。我们将一起了解区块链的内部运作,并探索信息如何在服务器的分布式网络上公开存储。02怎么做?这一切将通过从头开始构建一个简单的区...

【带着canvas去流浪(11)】Three.js入门学习笔记
【小宅按】 three.js 入门学习笔记 示例代码托管在:http://www.github.com/dashnowords/blogs 一. 资料推荐及建议 1.官方文档 很详细,但是API部分单独理解也很难,属于工具书。官方github仓库...

spark大数据分析实战(spark大数据处理)Python Apache Spark大数据实战教程
Python Apache Spark大数据实战教程 PySpark 教程包含 20 多个使用 Python 在桌面或 Hadoop 上分析大型数据集的动手示例! 课程英文名:Taming Big Data with Apache Spark and Python - Hands ...

