
卷积神经网络共87篇 第8页
排序
从三维激光扫描到3D模型
三维激光扫描技术是上世纪九十年代中期开始出现的一项技术,是继GPS空间定位系统之后又一项测绘技术的突破。它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数...
分割一切「3D高斯」版来了:几毫秒完成3D分割、千倍加速
机器之心报道 编辑:杜伟、蛋酱 有了上海交大和华为提出的 SAGA,辐射场中的交互式 3D 分割任务实现起来会更快、效果更好。 今年 4 月,Meta 发布「分割一切(SAM)」AI 模型,这项成果不仅成为...

3D视觉点云数据处理十大方法
本篇转载自3D视觉开发者社区用户“悟空”原文链接:3D视觉点云数据处理十大方法 导语 本文主要介绍三维计算机视觉中点云数据处理面对的问题,主要方法和技术,概述其特点。ICP点云配准就是我们...

常用点云后处理软件介绍
近年来我国很多企事业单位(如北京北科天绘、武汉海达数云、成都奥伦达、禾赛科技、深圳大疆及中科院上海光机所等)的激光雷达设备研制成果显著,自主产品不断地推陈出新,设备功能与性能愈发强...

基于大数据的企业税务风险控制模型,代码如何实现
数据收集和预处理:收集企业的财务和税务数据,包括会计报表、纳税申报表、进出口清单等,并进行数据预处理,例如数据清洗、去重、缺失值填充等。特征工程:根据数据特点和业务需求,提取出有意...

tetgen 使用说明 点云建模的利器
导读:tetgen是一款非常优秀的3D网格剖分软件,主要面向四面体网格。是一个德国的华人写的。整个程序包才2.2M,解压缩后为6.3M。非常小。 但是功能特别强大。一直没时间使用过。最近详细读了tet...
我的面板

看一看
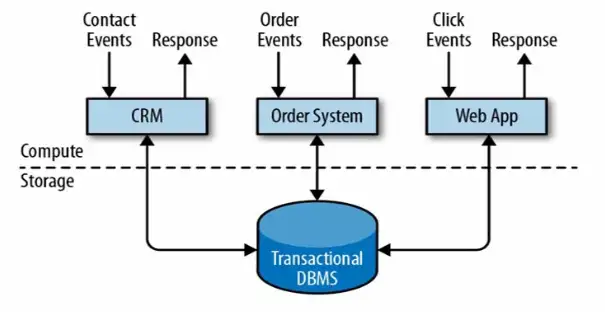
Flink学习笔记一:安装部署与快速入门
1、概述 1.1、基础介绍 Apache Flink is a framework and distributed processing engine for stateful computations over unbounded and bounded data streams. 1.2、数据处理结构演变 1)传统...

京东LBS推荐算法实践
原标题:京东LBS推荐算法实践 作者:京东零售 郑书剑 1、推荐LBS业务介绍 1.1 业务场景 现有的同城购业务围绕京东即时零售能力搭建了到店、到家两种业务场景。同城业务与现有业务进行互补,利用...
一文读懂Kubernetes 的 11 个部分
随着云计算的普及,Kubernetes的应用也越来越广泛,今天小编就来为大家介绍Kubernetes 的 11 个组成部分。 打开凤凰新闻,查看更多高清图片 1、Pod Pod 是 Kubernetes 中最小的可互动单元。一个...

Twitter 推荐算法开源,马斯克被“特殊照顾”34岁杨颖和46岁舒淇同台比美,一个网红脸、一个高级脸,一眼就能看出区别
整理 | 梦依丹 责编 | XXXXX出品 | CSDN(ID:CSDNnews) 在马斯克反复承诺表示要开源 Twitter 推荐算法之后,3 月 31 日,Twitter 部分推荐算法源码正式在 GitHub 上开放,采用 GNU Affero Gen...
ThreeJS简易魔方自动还原实现
© Young 2018-04-29 21:08Welcome to My GitHub在ThreeJS四步制作一个简易魔方中介绍了怎么实现一个可以转动的简易魔方,接来下准备介绍下怎么让这个简易魔方具备自动还原的功能。例子如下:可...
智慧农业技术及其应用(九):农业信息处理技术(2)
智慧农业飓风来袭! 什么是数字农业、农业大数据、智慧农业? 什么是农业物联网的基本理论、关键技术? 基础农业信息处理关键技术涉及方面主要包括:农业数据搜索技术、数据存储技术、大数据处...

