
卷积神经网络共87篇
排序

yolov3数据科学工具包:手把手用YOLO做目标检测
作为目前机器学习领域最火热的研究方向之一,计算机视觉相关的技术一直备受关注。其中,目标检测是计算机视觉领域常见的问题之一,如何平衡检测的质量和算法的速度很重要。对于这个问题,计算机...
3D点云识别安全吗?密歇根大学提出稳健性分析数据集应对严重失真
机器之心专栏 机器之心编辑部 来自密歇根大学等机构的研究者提出了一个新颖且全面的数据集 ModelNet40-C ,以系统地测试以及进一步提高点云识别模型对于失真的稳健性。 3D 点云广泛应用于 3D 识...
孙启超:卷积神经网络在人脸识别技术中的应用 | AI研习社第51期猿桌会
随着 iPhone X 的发布,Face ID 人脸识别技术开始进入人们的日常生活中,当我们拿起手机并看着它的时候就可以实现手机解锁的功能。而人脸识别中的关键技术就是卷积神经网络。 近日,在雷锋网 AI...

10 分钟 2 公里 | 大疆 L1 激光雷达城区配网点云建模示范
在电网运维向智能化、数字化迈进的过程中,三维点云数据模型的重要性日益凸显。基于三维点云模型,运维单位可以搭建设备信息管理数据库,实现线路可视化、数字化;还可规划无人机自动化飞行航线...

三维模型OSGB格式常见几款轻量化处理软件介绍
三维模型OSGB格式常见几款轻量化处理软件介绍 倾斜摄影三维模型OSGB格式是一种常见的三维数据格式,但由于数据量大、复杂性高等因素,处理和存储这些数据可能会带来很大的计算和空间成本。为了...
超越yolov5(yolov3超参数设置)YOLOv6 3.0超越YOLOv8|更好的Neck、辅助训练分支、蒸馏学习,
点击@CV计算机视觉,关注更多CV干货 论文:YOLOv6 v3.0: A Full-Scale Reloading代码:https://github.com/meituan/YOLOv6单位:美团1.亮点 YOLOv6 3.0版本在以前的基础上,增加了:更好的网络...
我的面板

看一看
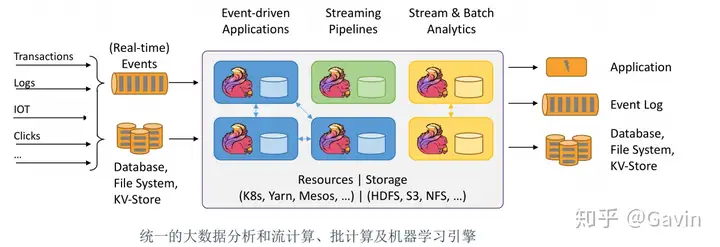
Flink理论实战
一、Flink核心概念 1、Flink核心概念 (1)Flink是什么 ?Apache Flink是一个分布式大数据处理引擎,可对有限数据流和无限数据流进行有状态计算。 可部署在各种集群环境,对各种大小的数据规模...

昨夜今晨:微软推出ChatGPT新版Bing和Edge 百度ChatGPT项目“文心一言“ 三月上线
2023年2月8日 驱动中国昨夜今晨 微软发布新版Bing搜索和edge浏览器 加入ChatGPT技术 昨日,微软正式发布新版必应搜索引擎,该引擎整合了ChatGPT系统技术。这标志着微软多年来首次有机会超越“搜...

实测:ChatGPT做10种PPT方案,10组提示词秒出方案!
如何用 ChatGPT 快速生成 PPT 方案呢?本文作者总结出了三步:先生成风格关键词,再生成完整方案,最后转换成 PPT。根据这三个步骤,作者用 10 组提示词,快速生成了 10 种 PPT 方案,一起来学...
脑科学能用Transformer做什么?
图片来源@视觉中国 文 | 追问nextquestion 自ChatGPT问世以来,“Transformer模型”始终以超高频率出现在各个AI新产品模块当中。比如,大家所熟知的GPT-4、Midjourney、GitHub Copilot等,它们...
大数据分析技术与实战之 Spark Streaming
Spark是基于内存的大数据综合处理引擎,具有优秀的作业调度机制和快速的分布式计算能力,使其能够更加高效地进行迭代计算,因此Spark能够在一定程度上实现大数据的流式处理。 随着信息技术的迅...

我爱推R计划使用教程,5分钟打造高水平VR个人主页
注册地址https://r.5itui.com 如何注册就不用多说了吧 进入之后: 第一步:点击虚拟游览,然后在上面的空白处填入需要创建游览的名字,再点右面的创建按钮,...

