
卷积神经网络共87篇 第10页
排序
关于激光点云逆向建模
随着上世纪九十年代,三维激光扫描技术的出现,点云概念开始被提及。 点云是目标表面特性的海量点集合,点云越密集,反映的图像细节和信息就越多。 当我们利用三维激光扫描仪扫描某一建筑表面时...
十大点云数据处理技术梳理
研究点云数据时,感觉无从下手? 看看这十大点云数据处理技术,换个思路学点云。 点云 · 定义 简言之,在获取物体表面每个采样点的空间坐标后,得到的是一个点的集合,称之为“点云”。包括三...

Lidar Studio点云处理与分析软件
Lidar Studio V1.3正式发布 新增功能航带平差模块:自动进行航带平差、计算安置误差,支持SBET格式的航迹文件视图模块:每个点云单独进行渲染设置(按高程渲染等)Lidar Studio V1.2正式发布 新...
让3D编辑像PS一样简单,GaussianEditor几分钟内完成3D场景增删改
机器之心专栏 机器之心编辑部 重播 播放 00:00 / 00:00 直播 00:00 进入全屏 50 点击按住可拖动视频 3D 编辑在游戏和虚拟现实等领域中发挥着至关重要的作用,然而之前的 3D 编辑苦于耗时间长以...
超越yolov5(yolov3超参数设置)YOLOv6 3.0超越YOLOv8|更好的Neck、辅助训练分支、蒸馏学习,
点击@CV计算机视觉,关注更多CV干货 论文:YOLOv6 v3.0: A Full-Scale Reloading代码:https://github.com/meituan/YOLOv6单位:美团1.亮点 YOLOv6 3.0版本在以前的基础上,增加了:更好的网络...
3D Gaussian Splatting 数据压缩【高斯泼溅】
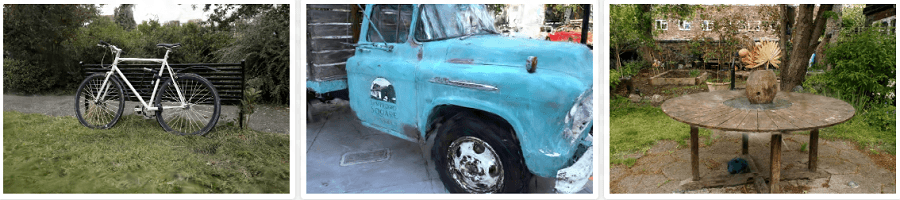
在上一篇文章中,我开始研究高斯泼溅(3DGS:3D Gaussian Splatting)。 它的问题之一是数据集并不小。 渲染图看起来不错。 但“自行车”、“卡车”、“花园”数据集分别是一个 1.42GB、0.59GB...
我的面板

看一看

用ChatGPT搞定K8s!
原标题:用ChatGPT搞定K8s! Kubernetes(K8s)非常火,但被人诟病最多的还是其复杂性,并且不管是在云中还是本地,都没有很好的集群故障排除的方法。因此,尽管K8s的采用率持续增长,但许多开...
谷歌承认Kubernetes太复杂,于是开启了容器界的Autopilot
试问上手Kubernetes有多难?有时候真得会让你怀疑人生。 过去几年,就连互联网大厂的技术砖家也得细细捋。 “尽管我们过去几年看到越来越多的企业开始拥抱Kubernetes,但是随后就陷入了困境。”...
kubernetes简介-这是一篇学习k8s必看的文章
你想要学习k8s吗?如果想要学习k8s就需要了解什么是k8s,这篇文章通过图文形式很好的解释了k8s到底是什么,正所谓众里寻他千百度,蓦然回首,那人却在,灯火阑珊处。只有读到通俗易懂的文章你才...
警告!Kubernetes集群正在遭挖矿劫持,这一次目标是Kubeflow,微软ASC呼吁:不要随意更改默认设置
Azure Kubernetes又被盗了! 6月10日,微软Azure安全中心(ASC)正式发出警告,黑客正在对Kubernetes集群中的机器学习工具包Kubeflow安装加密货币旷工,试图利用CP Azure Kubernetes又被盗了! ...
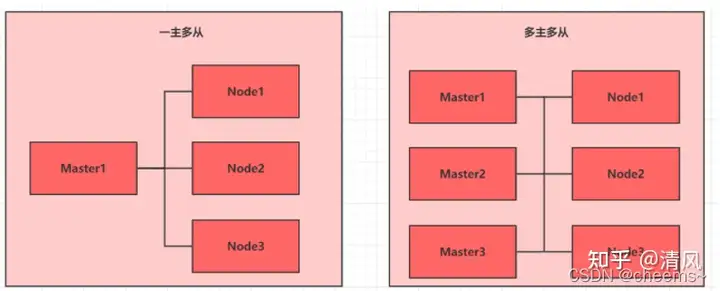
Kubernetes—集群环境搭建
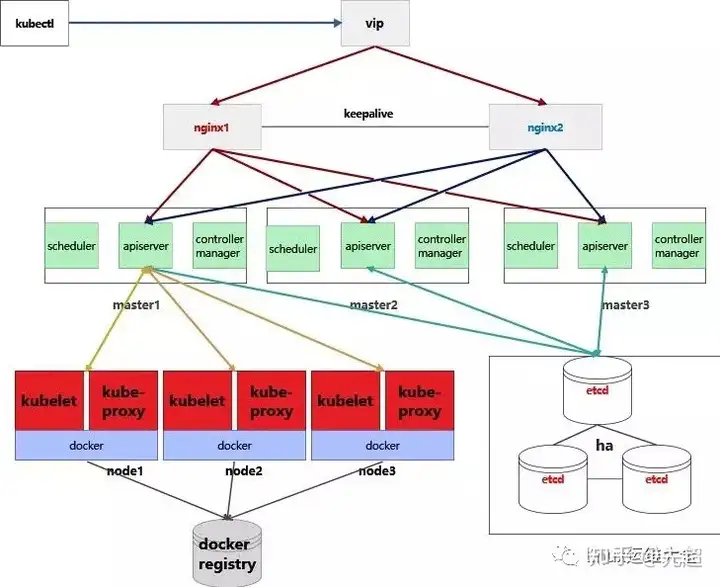
前言 自己摸索着搭建k8s集群花了好多时间,网上的教程良莠不齐,根据本博文按照顺序搭建,100%成功,并且理解。 环境规划 集群类型 kubernetes集群大体上分为两类:一主多从和多主多从。 - 一主...
关于激光点云逆向建模
随着上世纪九十年代,三维激光扫描技术的出现,点云概念开始被提及。 点云是目标表面特性的海量点集合,点云越密集,反映的图像细节和信息就越多。 当我们利用三维激光扫描仪扫描某一建筑表面时...

