
卷积神经网络共87篇 第11页
排序

【你只需看一次】YOLO 全系列目标检测算法
IFQ-Tinier-YOLOIFQ-Net: Integrated Fixed-point Quantization Networks for Embedded Vision作者:Hongxing Gao, Wei Tao, Dongchao Wen, Tse-Wei Chen, Kinya Osa, Masami Kato单位:Canon I...
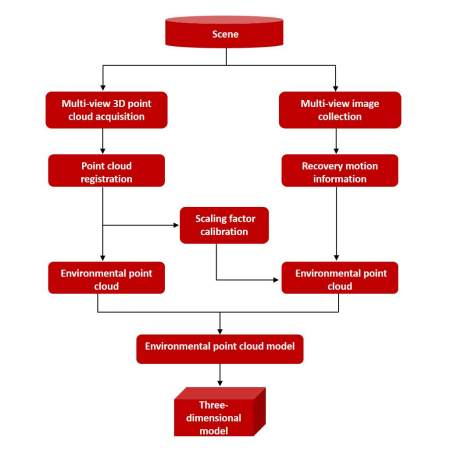
微美全息开发基于图像、点云融合的三维重建算法系统,塑造真实数字世界
随着计算机视觉和空间信息技术的不断发展,三维场景重建是获取空间信息的重要途径。三维场景重建所涉及的领域有计算机科学、数据融合、图像处理等多个学科,且多学科之间相互交叉。目前,三维场...
3D Gaussian Splatting 数据压缩【高斯泼溅】
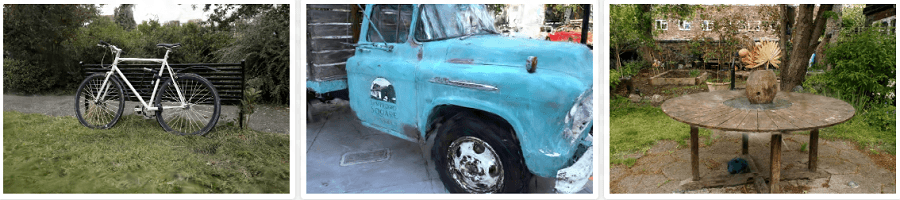
在上一篇文章中,我开始研究高斯泼溅(3DGS:3D Gaussian Splatting)。 它的问题之一是数据集并不小。 渲染图看起来不错。 但“自行车”、“卡车”、“花园”数据集分别是一个 1.42GB、0.59GB...

高效低成本构建元宇宙场景:NeRF神经辐射场
文/VR陀螺冉启行 NeRF 技术可以加速元宇宙的发展,为 VR 和 AR 硬件设备提供独特的三维内容。 在 VR 游戏和虚拟世界(如《地平线山之呼唤》)中展示的3D 图形通常由数百万个相互连接的多边形组...
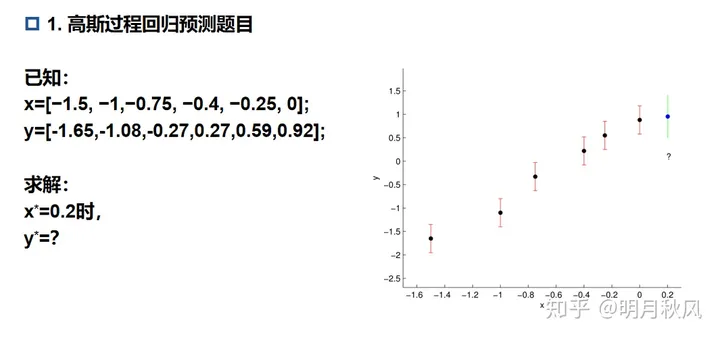
快速入门高斯过程(Gaussian process)回归预测
前言 这篇文章主要是教会你如何快速了解高斯过程进行回归预测的,并没有太多的公式推导,只有简单的相关的概念的介绍,如果您要自己掌握并使用高斯过程进行一个简单的预测,当然还需要进行一些...
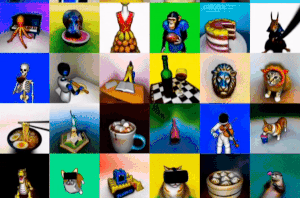
OpenAI 上新,单卡 1 分钟生成 3D 点云,text-to 3D 告别高算力消耗时代
内容一览:继 DALL-E、ChatGPT 之后,OpenAI 再发力,于近日发布 Point·E,可以依据文本提示直接生成 3D 点云。 关键词:OpenAI 3D 点云 Point·E OpenAI 年底冲业绩,半个多月前发布的 ChatGP...
我的面板

看一看
了解 Kubernetes 的 limits 和 requests
在 Kubernetes 中, 如何合理的设置容器资源请求和限制,对于优化应用程序和 k8s 集群性能至关重要。 Namespace quotas(名称空间配额) Kubernetes 允许管理人员对特定的命令空间(namespace)...
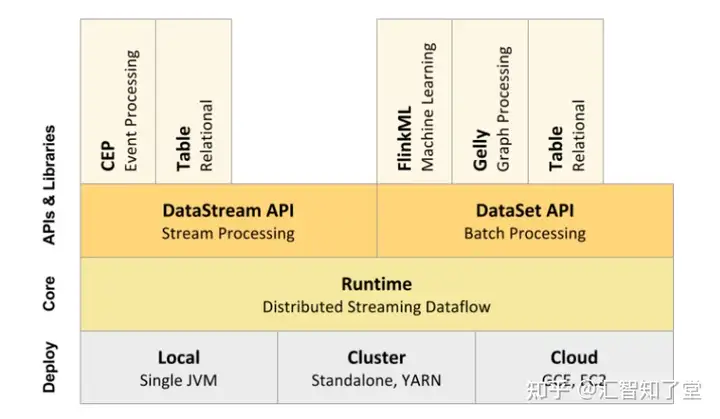
什么是Flink?Flink入门教程
1 Flink概述1.1 数据流与流计算数据流是一串连续不断的数据的集合,就象水管里的水流,在水管的一端一点一点地供水,而在水管的另一端看到的是一股连续不断的水流。类似于人们对河流的理解本质...

spark—实践之DataSet实战企业人员管理系统应用案例
此案例参考书籍《Spark大数据商业实战三部曲》,特做学习笔记,巩固学习过程。案例预览:给每位员工的年龄增加100给特定的员工年龄增加70,其他增加30对人员信息中的重复数据进行去重按年龄进行...
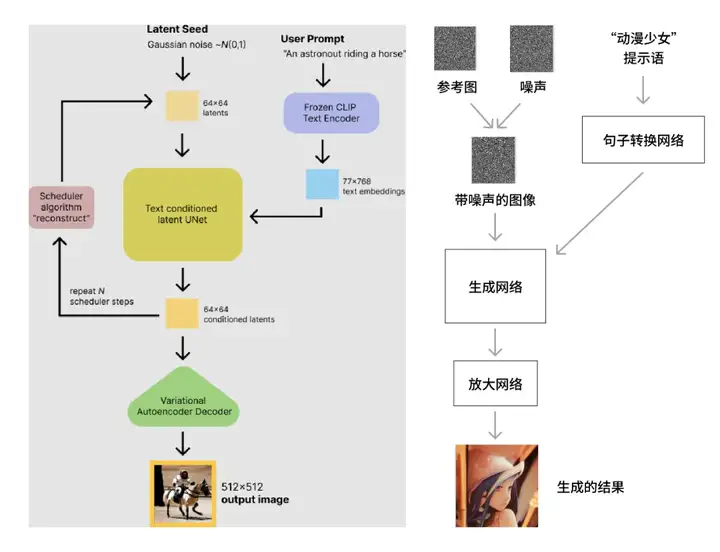
什么是AI绘画与stable diffusion讲解
(这篇文章是给那些打算接触AI绘画和还不太了解的人写的)什么是AI绘画?什么配置才能AI绘画?要怎样部署文件、输入咒语?你是否有着这样的疑问,在这个系列我会写一下我近一个多月的学习成果,...
零基础如何构建部署NLP软件?基于预训练模型的NLP入门软件项目
写在前面 昨天Cortex v0.12开源了,以前笔者做过一段独立的iOS开发者,相对于平时的研究,也对ML如何构建web api服务有所兴趣。这种既能构建软件服务也适合入门的NLP学习内容,特别想分享推荐。...

保持人物姿势AI换脸:stable-diffusion教学之ControlNet+lora
作者:yasden本文介绍用ControlNet固定人物姿势,利用lora换脸的方法。本文信息量非常大,建议收藏备用。stable diffusion这款免费的AI作图软件可以保持人物姿势,一键轻松给人物换脸,包括保持...

