
卷积神经网络共87篇 第9页
排序
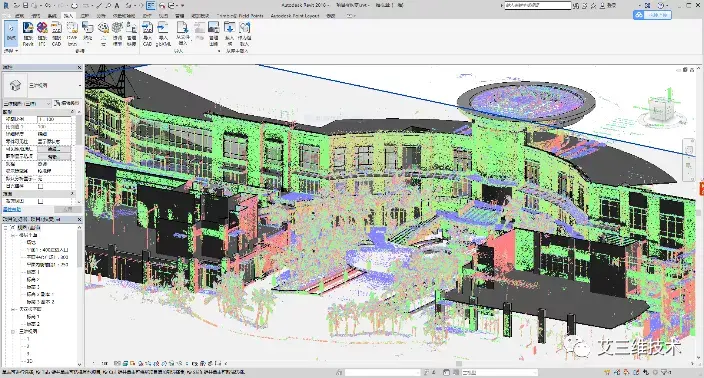
点云数据怎么生成三维模型?
点云”(Point Cloud)简单来说,就是通过测量仪器在获取物体表面每个采样点的空间坐标后,得到的是一个点的集合。 通常使用三维坐标测量机所得到的点数量比较少,点与点的间距也比较大,叫稀疏点...
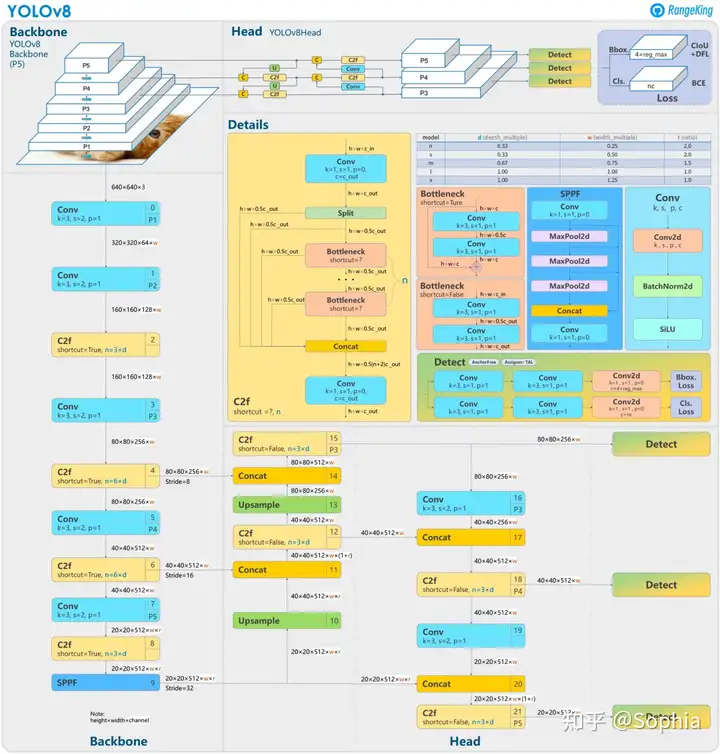
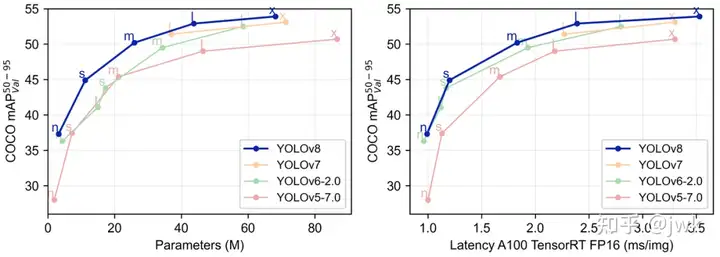
SOTA!目标检测Yolo系列YOLOv8全新问世!,
厉害了,Yolov8都更新了!YOLOv8 的整体架构如下图所示:YOLOv8 架构。图源:GitHub 用户 RangeKing。YOLOv8 项目地址:https://github.com/ultralytics/ultralyticsYOLOv8 模型介绍下图是 YOLO...

点云怎么生成三维模型
在了解点云怎么生成三维模型前,我们先来看下点云是怎么得来的,它有什么作用? 点云数据的由来,要从测绘领域说起。国际测绘领域近几十年获得了迅速的发展,倾斜摄影技术和三维激光扫描技术在...

基于点云的3D管道自适应重建与建模方法
在激光扫描点云中自动提取平面、球体、圆柱体、锥体和环面等三维几何形状是一个具有挑战性的问题,也是一个繁琐的过程,特别是在使用杂乱的数据时。 目前现有激光扫描点云的方法具有过大的空间...
yolov3训练自己的数据集(yolov4训练自己的数据集)yolov8,
YOLOv8 是 ultralytics 公司在 2023 年 1 月 10 号开源的 YOLOv5 的下一个重大更新版本,目前支持图像分类、物体检测和实例分割任务,在还没有开源时就收到了用户的广泛关注。 开源地址:https:...
从三维激光扫描到3D模型
三维激光扫描技术是上世纪九十年代中期开始出现的一项技术,是继GPS空间定位系统之后又一项测绘技术的突破。它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数...
我的面板

看一看

Stable diffusion 3 正式开源
6月12日晚,著名开源大模型平台Stability AI正式开源了,文生图片模型Stable Diffusion 3 Medium(以下简称“SD3-M”)权重。 SD3-M有20亿参数,平均生成图片时间在2—10秒左右推理效率非常高,...
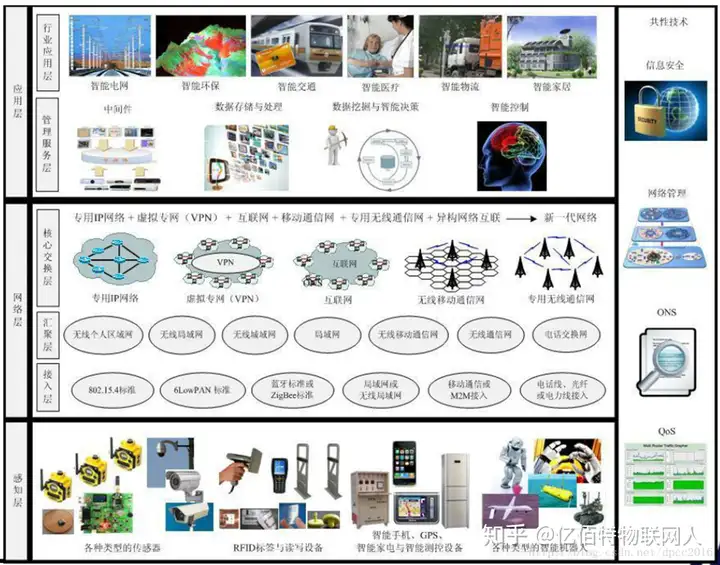
物联网5大关键技术及其体系结构
一、物联网的体系结构 现在智能家居已经深入人心,而智能家居的实现离不开物联网技术。那么什么是物联网呢? 小编将物联网简单的概括为:物联网利用无线射频识别(电子标签系统)、红外传感器、汽...

Python手写机器学习最简单的KNN算法
作者|苏克1900 来源|高级农民工(ID:Mocun6) 摘要:从零开始学习机器学习最简单的 KN 打开凤凰新闻,查看更多高清图片 作者|苏克1900 来源|高级农民工(ID:Mocun6) 摘要:从零开始学习...

物联网技术应用与维护实训平台
原标题:物联网技术应用与维护实训平台 HYWLW-3 物联网技术应用与维护实训平台 物联网技术应用应用与维护实训台采用全喷塑钢制作,表面光滑平整,不易积尘,平台前端设立有供来电指示及漏电保护...

Unity做VR全平台游戏开发(二)——Unity开发环境安装
一、安装Unity 目前推荐安装Unity2020的LTS版本,即Unity2020.3.x版本 尝试过Unity2021的LTS版本,发现几乎每次打包的时候会触发重新构建Shader变体,导致打包很慢,所以放弃了,不知道目前最新...
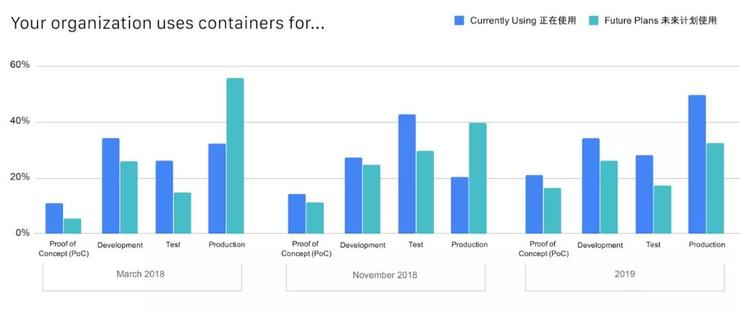
CNCF公布中国云原生调查报告:49%使用容器技术,Kubernetes 应用率达 72%
近日,云原生计算基金会(Cloud Native Computing Foundation,CNCF)发布了第三次中国云原生调查报告(2019年)。此次调查基于 300 名受访对象,其中 97% 来自亚洲(主要是中国)。报告显示49...

