
卷积神经网络共87篇 第7页
排序
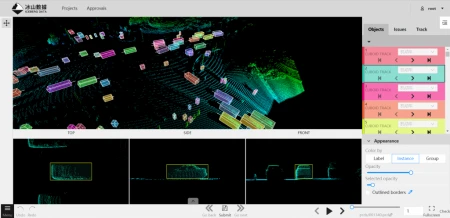
自动驾驶数据标注案例研究——3D 点云中的语义分割
3D点云语义分割和目标检测的区别 点云语义分割和点云目标检测都是处理三维点云数据的任务,但它们的目标和方法不同。 点云语义分割的目标是将点云中的每个点分配到一些预定义的语义类别中,例如...

AI技术让手办“整活”:3D建模居然可以这样简单
原创 Synced 机器之心 机器之心报道 机器之心编辑部 拍短视频、发朋友圈,整活必备? 科技领域,既有用元宇宙开发布会的公司,也有 All in 元宇宙的公司,很多虚拟世界已经建立起来,人们面临的...
从三维激光扫描到3D模型
三维激光扫描技术是上世纪九十年代中期开始出现的一项技术,是继GPS空间定位系统之后又一项测绘技术的突破。它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数...
摄影实时建模,用照片生成3D模型
建模软件+教程获取方式见文末 “传统的基地调研大多通过手机、相机拍照记录 在无人机诞生后 拍摄角度由人的视角变成了上帝视角 即便如此 在汇报讨论之时 我们还是依赖一个冗长单调PPT 来拼凑还...

3d模型如何生成点云数据?
—————————— 2016.08.11 补充 ———————————— 有朋友说obj格式用pcl_mesh2pcd是可以均匀采样的。 我用mesh2pcd一直core dumped,所以没运行成功过,因此补充。 ——————...

用3D点云重建三维模型网格【Python】
本文将介绍 使用 python 从点云快速创建网格的3D 表面重建过程,你可以导出、可视化并将结果集成到最喜欢的 3D 软件中,而无需任何编码经验。此外,我们还将介绍一种生成多个细节级别 (LoD) 的...
我的面板

看一看

细看Kubernetes部署
Venafi云原生解决方案高级主管Sitaram Iyer表示,Kubernetes已成为整个行业的事实标准,以确保容器工作负载符合规范并可扩展。Kubernetes现在被称为世界上最大的容器化工作负载编排平台,83%的...
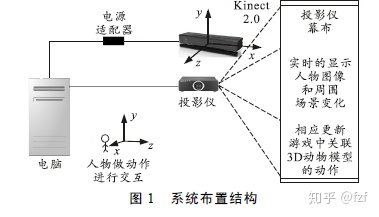
unity3D AR体感游戏的设计与实现
传统游戏中,人们都通过键盘、鼠标、触摸屏以及手柄游历于游戏世界,弊端是人和游戏交流的肢体仅限于手,长此以往,对人们身心健康无益,特别是对青少年,微软体感设备kinect让人们全身动了起来...
11个Kubernetes集群监控工具
在过去的几年中,Kubernetes在容器编排上成为了众多企业的首选,并得到了迅速普及。今天,就为大家介绍11个Kubernetes集群监控工具。 1.Kubebox Kubebox是Kubernetes集群的终端控制台,它使你可...
九大换脸软件排行榜 视频换脸软件哪个好 AI换脸是什么软件
在人工智能的大潮下,许多ai换脸软件纷纷进入市场,虽然存在隐私问题,但凭借独特的娱乐性,依旧掀起了一股换脸热潮,同时蚂蚁金服官方表示:换脸软件不会带来“刷脸支付”的安全问题。下面来看...
函数返回值类型优化,JSX增强,TypeScript 5.1 发布!
原标题:函数返回值类型优化,JSX增强,TypeScript 5.1 发布! 译者 | 禾木木责编 | 夏萌 出品 | CSDN(ID:CSDNnews) 近日,微软宣布正式发布 Type 5.1版本。 如果你还不熟悉 Type,它是一种...
「Unity基础知识」VR开发环境的搭建
VR一直是一个非常火热的话题,尤其在5G技术之后, VR将会走上又一个新的高度,所以VR的前景大家也是有目共睹的。那么现在我们来讲讲如何才能迈出VR开发的第一步即VR开发环境的搭建。 说起VR大家...

