
卷积神经网络共87篇 第10页
排序

基于神经网络算法的TeamFree会议一体机降噪实战
原标题:基于神经网络算法的TeamFree会议一体机降噪实战在线会议、在线教育、直播等线上模式改变了办公、教育等行业的传统交互模式,成为时下新兴的刚需,原来小众领域的应用,正在向更广泛的领域...
关于激光点云逆向建模
随着上世纪九十年代,三维激光扫描技术的出现,点云概念开始被提及。 点云是目标表面特性的海量点集合,点云越密集,反映的图像细节和信息就越多。 当我们利用三维激光扫描仪扫描某一建筑表面时...
Photoscan、Pix4d、UASMaster、TBC无人机影像处理软件对比测评
前言导读: 无人机数据采集仅仅只是测绘工作流程中的第一个环节,如何快速处理影像数据?如何生成高质量的交付成果?高效、智能化的无人机影像处理软件逐渐成为行业重点关注之一,市面上也衍生...
目标检测方法(目标检测怎么学)《目标检测》-第32章-浅析YOLOv8,
近期,YOLOv5原班人马推出了YOLO的最新SOTA——YOLOv8,在又一次刷新了YOLO系列的顶峰性能的同时,团队还重构了自YOLOv3和YOLOv5以来的代码风格,似乎不如先前简洁了,但据小道消息称,此次修改...
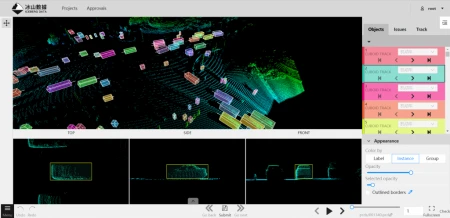
自动驾驶数据标注案例研究——3D 点云中的语义分割
3D点云语义分割和目标检测的区别 点云语义分割和点云目标检测都是处理三维点云数据的任务,但它们的目标和方法不同。 点云语义分割的目标是将点云中的每个点分配到一些预定义的语义类别中,例如...
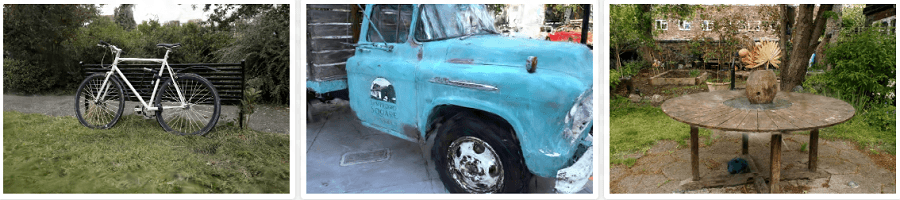
3D Gaussian Splatting 数据压缩【高斯泼溅】
在上一篇文章中,我开始研究高斯泼溅(3DGS:3D Gaussian Splatting)。 它的问题之一是数据集并不小。 渲染图看起来不错。 但“自行车”、“卡车”、“花园”数据集分别是一个 1.42GB、0.59GB...
我的面板

看一看

智慧农业的两大技术及应用场景解析
科技创新始终是各行业未来发展的主旋律,农业当然也不例外。现如今,如何让科技为农业插上腾飞的翅膀,为农业高质量发展提供强劲动力,成为当下的关键问题。 (益都智能集团-无磁物联网水表) ...
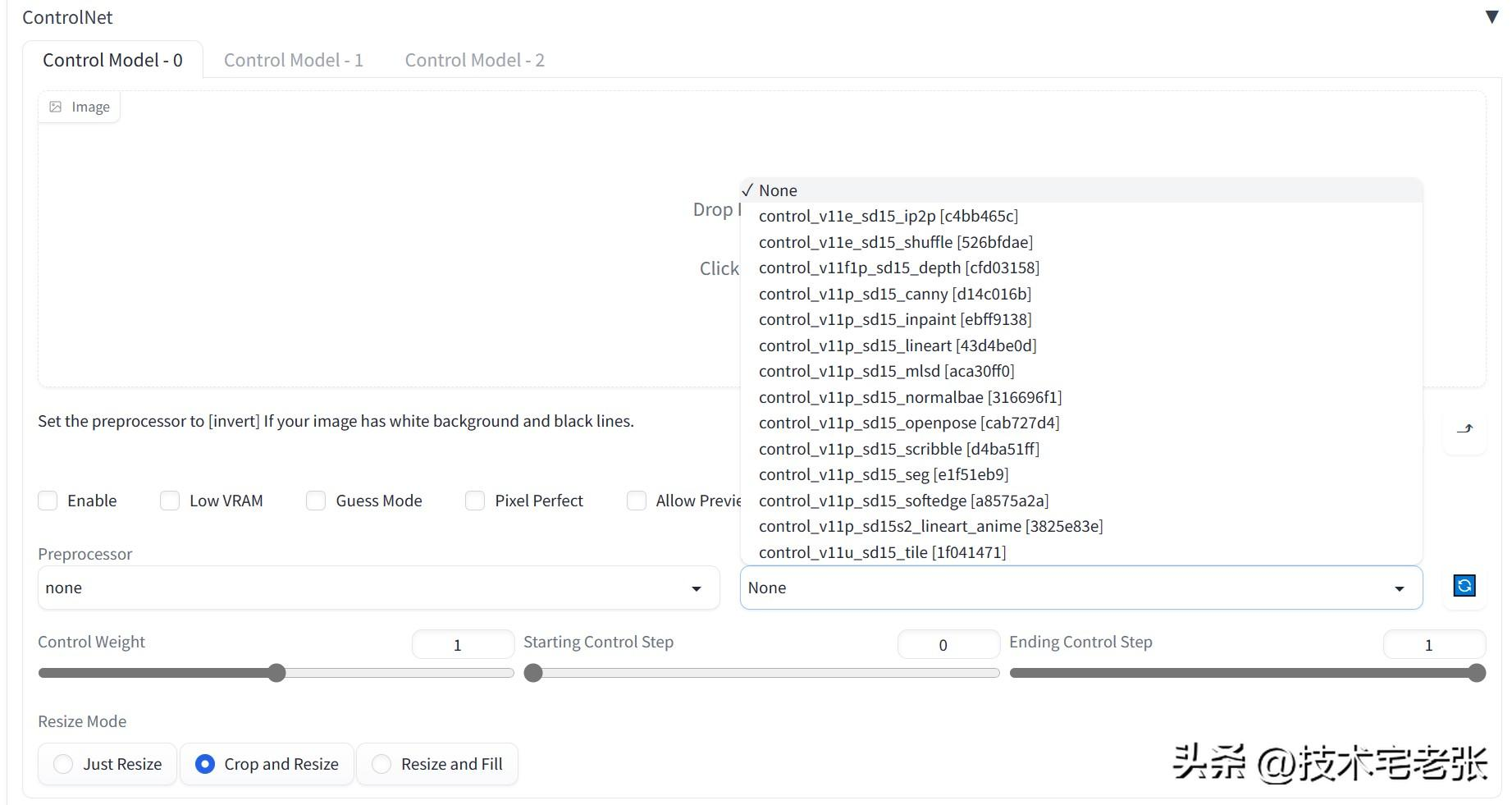
Stable diffusion AI画图扩展插件 —— ControlNet 1.1版本介绍(一)
10天前,ControlNet 版本从1.0更新到了1.1版本,新版本的模型数量从原来的 8 个增加到了 14 个,其中 11 个已完成模型,2 个实验模型和 1 个未完成模型,这些模型里也包含了 1.0 版本的模型,并...
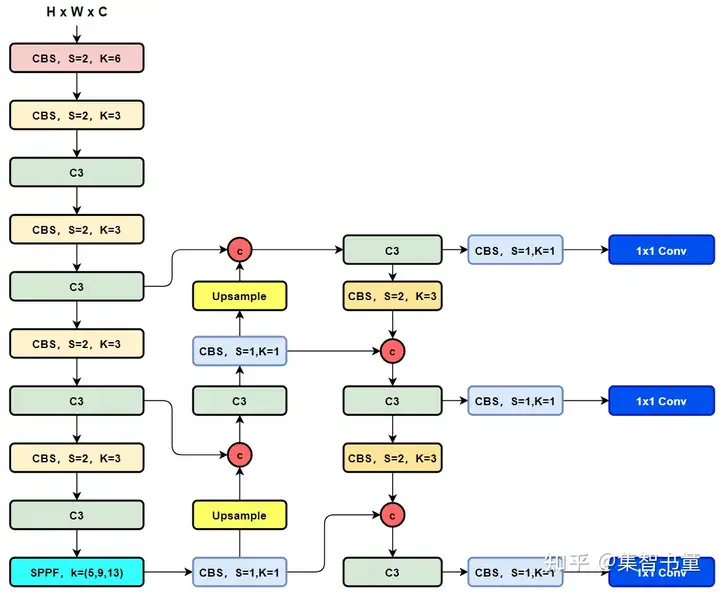
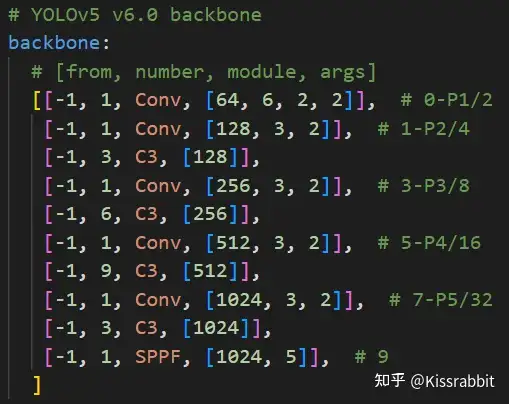
YOLOv8来啦 | 详细解读YOLOv8的改进模块!YOLOv5官方出品YOLOv8,必卷!
回顾一下YOLOv5,不然没机会了 这里粗略回顾一下,这里直接提供YOLOv5的整理的结构图吧:Backbone:CSPDarkNet结构,主要结构思想的体现在C3模块,这里也是梯度分流的主要思想所在的地方;PAN-F...

Rust函数式编程全解析
闭包Rust的闭包是匿名函数,您可以将其保存在变量中或作为参数传递给其他函数。您可以在一个地方创建闭包,然后调用该闭包以在不同的上下文中对其进行评估。与函数不同,闭包可以从定义它们的作...
极客们都在玩这些 Terminal!
GitHub 热点速览 | 极客们都在玩这些 Terminal! 以下文章来源于 HelloGitHub ,作者 HelloGitHub 作者 | HelloGitHub- 小鱼干 来源 | HelloGitHub(ID:GitHub520) 头图 | &nbs...

区块链开发搭建指南,他为什么受欢迎
区块链在公众视野中已经存在 10 多年,从那时起,该技术发生了显着的发展。有些人热衷于加密货币,而另一些人则对区块链开发感兴趣——他们想为企业和个人的利益创建自己的区块链解决方案。然而...

