大家都在看


最新发布第15页
排序
OpenAI 上新,单卡 1 分钟生成 3D 点云,text-to 3D 告别高算力消耗时代
内容一览:继 DALL-E、ChatGPT 之后,OpenAI 再发力,于近日发布 Point·E,可以依据文本提示直接生成 3D 点云。 关键词:OpenAI 3D 点云 Point·E OpenAI 年底冲业绩,半个多月前发布的 ChatGP...
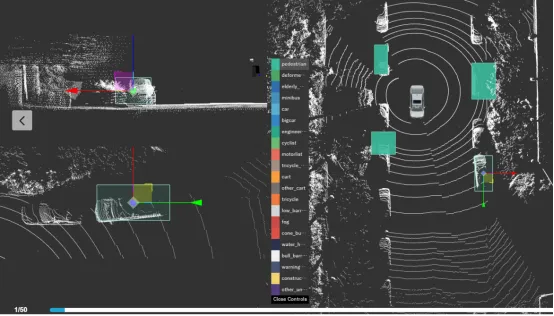
景联文科技:四种常见的3D点云标注方法
近日,据可靠消息,我国监管部门将为无人驾驶车辆发放绿牌。中国或有望成为继德国之后全球第二个为L3级乘用车量产放行的国家,这表明了自动驾驶时代或将到来。 四种常见的3D点云标注方式 1、3D...
DALL·E的3D版来了,OpenAI提出Point·E,一个由复杂提示生成三维点云的系统
DALL·E的3D版来了,OpenAI提出Point·E,一个由复杂提示生成三维点云的系统 【写在前面】 虽然最近关于文本条件3D对象生成的工作已经显示出令人振奋的结果,但最先进的方法通常需要多个GPU小时...
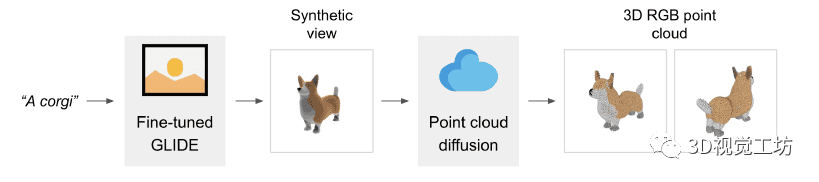
Point-E:使用扩散模型从文本提示中生成3D点云
虽然最近关于根据文本提示生成 3D点云的工作已经显示出可喜的结果,但最先进的方法通常需要多个 GPU 小时来生成单个样本。这与最先进的生成图像模型形成鲜明对比,后者在几秒或几分钟内生成样本...
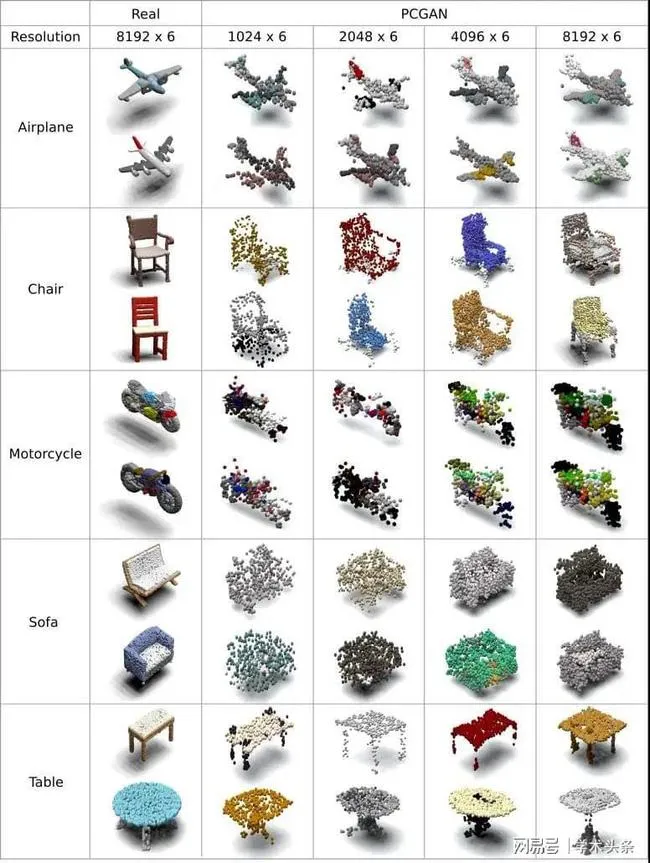
AI首个3D点云+GAN新方法,让机器人“眼神”更犀利
随着 AI、机器人技术的不断发展,人们的生活得到了“AI 机器人们”的各种帮助:大到太空机器人辅助宇航任务,小到家用扫地机器人解放我们的双手,可以说,机器人在人类生活中充当的角色越来越多...
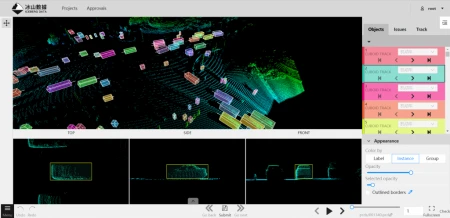
自动驾驶数据标注案例研究——3D 点云中的语义分割
3D点云语义分割和目标检测的区别 点云语义分割和点云目标检测都是处理三维点云数据的任务,但它们的目标和方法不同。 点云语义分割的目标是将点云中的每个点分配到一些预定义的语义类别中,例如...






VR看房








![表情[haobang]-卡咪卡咪哈-一个博客](https://kmkmha.com/wp-content/themes/zibll/img/smilies/haobang.gif)



