
人工智能共680篇 第16页
chatgpt,nlp,人工智能,aigc
排序

高效低成本构建元宇宙场景:NeRF神经辐射场
文/VR陀螺冉启行 NeRF 技术可以加速元宇宙的发展,为 VR 和 AR 硬件设备提供独特的三维内容。 在 VR 游戏和虚拟世界(如《地平线山之呼唤》)中展示的3D 图形通常由数百万个相互连接的多边形组...
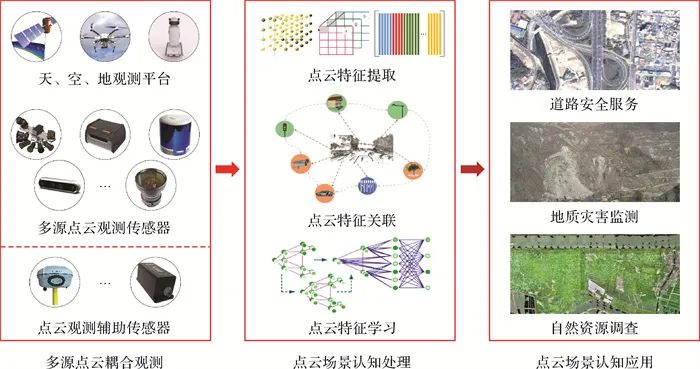
学术交流 | 点云场景认知模式——泛化点云
以下文章来源于智绘科服 ,作者测绘学报 智绘科服. 更具学术范儿的地理信息传媒 ↑ 点击上方「中国测绘学会」 可快速关注我们 摘要: 随着传感器技术和观测平台的迅速发展, 点云大数据作为新型...
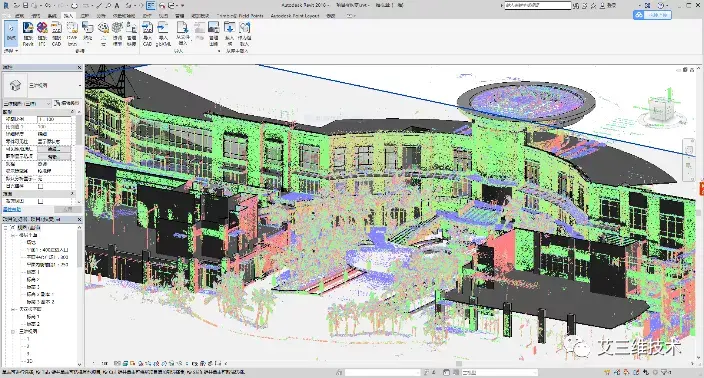
点云数据怎么生成三维模型?
点云”(Point Cloud)简单来说,就是通过测量仪器在获取物体表面每个采样点的空间坐标后,得到的是一个点的集合。 通常使用三维坐标测量机所得到的点数量比较少,点与点的间距也比较大,叫稀疏点...
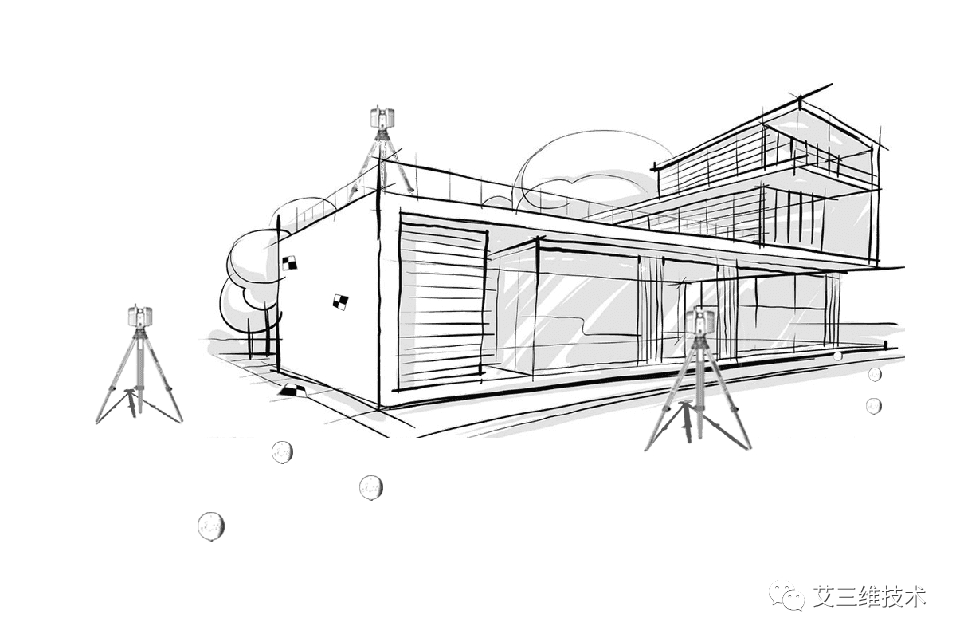
关于激光点云逆向建模
随着上世纪九十年代,三维激光扫描技术的出现,点云概念开始被提及。 点云是目标表面特性的海量点集合,点云越密集,反映的图像细节和信息就越多。 当我们利用三维激光扫描仪扫描某一建筑表面时...

tetgen 使用说明 点云建模的利器
导读:tetgen是一款非常优秀的3D网格剖分软件,主要面向四面体网格。是一个德国的华人写的。整个程序包才2.2M,解压缩后为6.3M。非常小。 但是功能特别强大。一直没时间使用过。最近详细读了tet...
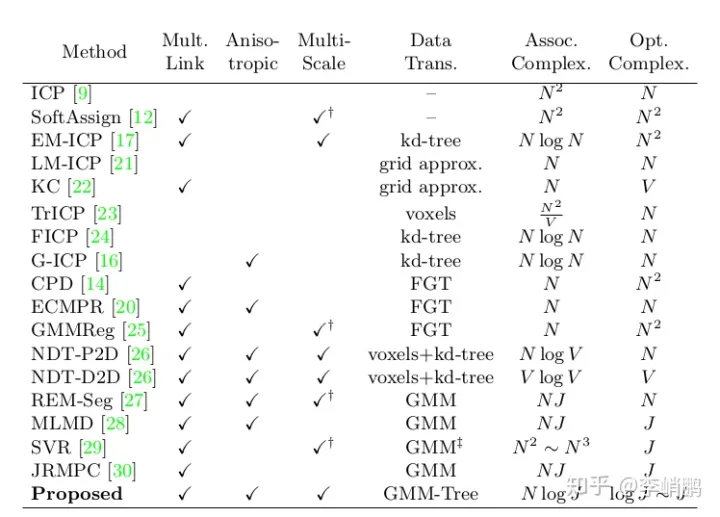
基于高斯混合模型树的点云建立和配准(2)
19. Evangelidis, G.D., Kounades-Bastian, D., Horaud, R., Psarakis, E.Z.: A generative model for the joint registration of multiple point sets. In: ECCV 2014. (2014) 109– 122 2, 3,...
我的面板

看一看

JS常见的报错及异常捕获,
在开发中,有时,我们花了几个小时写的Js 代码,在游览器调试一看,控制台一堆红,瞬间一万头草泥马奔腾而来。至此,本文主要记录Js 常见的一些错误类型,以及常见的报错信息,分析其报错原因,...

Stable Diffusion怎样训练模型
Stable Diffusion模型是一种在文本到图像生成方面具有很高潜力的模型。本篇文章将介绍如何使用Dreambooth项目进行Stable Diffusion模型训练。从数据准备到模型优化,我们将帮助您掌握和了解训练...
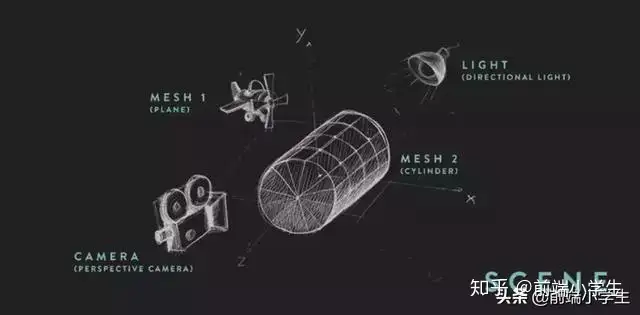
一步步带你实现web全景看房——three.js
canvas画2d相信大家都很熟悉了,但3d世界更加炫酷。我们直接从three.js入手。下面我们从0开始来摸索一下3d世界1. 基本概念 在THREEjs中,渲染一个3d世界的必要因素是场景(scene)、相机(camer...

Nature子刊|Dana-Farber癌症研究所开发基于大型癌症基因组数据集的NLP模型,适用多种癌症类型
打开凤凰新闻,查看更多高清图片 肿瘤生物标志物在癌症早筛、诊断及治疗、预后中发挥着关键作用,为提高肿瘤生物标志物的应用效果,就需要对经过深度分子表征的大量肿瘤数据集进行系统性分析。...

海克斯康:数字孪生+工业互联网技术智能工厂建设管理创新实践
为深入贯彻党的二十大报告提出的“完善中国特色现代企业制度,加快建设一流企业”等重大部署,深化提升“工赋青岛·智造强市”品牌,落实全市加力提速先进制造业高质量发展大会关于“塑造企业管...
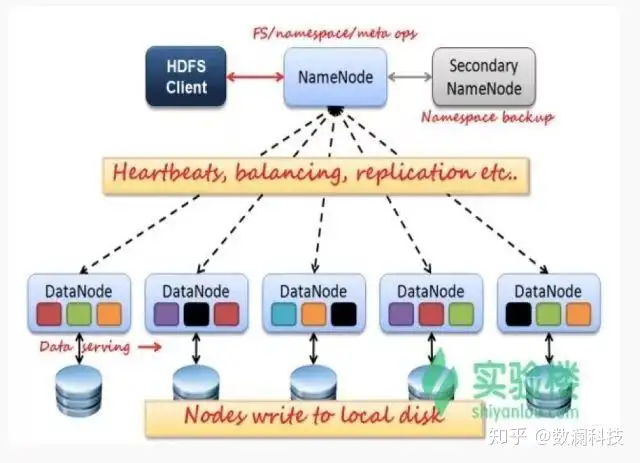
菜鸟的Hadoop快速入门
一、相关概念 1、大数据 大数据是一门概念,也是一门技术,是以Hadoop为代表的大数据平台框架上进行各种数据分析的技术。 大数据包括了以Hadoop和Spark为代表的基础大数据框架,还包括实时数据...

