
3D成像共60篇 第4页
三维物理成像
排序

常用点云后处理软件介绍
近年来我国很多企事业单位(如北京北科天绘、武汉海达数云、成都奥伦达、禾赛科技、深圳大疆及中科院上海光机所等)的激光雷达设备研制成果显著,自主产品不断地推陈出新,设备功能与性能愈发强...

「小知识」大疆禅思L1在地形测绘场景的操作流程
地形测绘场景主要针对生成地形图、等高线、工程断面图等应用,同时也适用于进行单木分割等林业调查项目。 01 检查点布设 在地形测绘作业中,一般可使用全站仪、RTK 设备测量若干检查点来检核精...
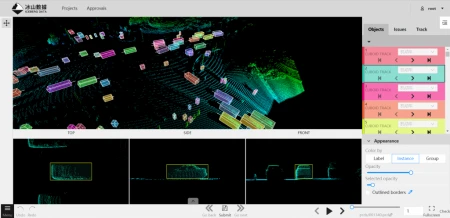
自动驾驶数据标注案例研究——3D 点云中的语义分割
3D点云语义分割和目标检测的区别 点云语义分割和点云目标检测都是处理三维点云数据的任务,但它们的目标和方法不同。 点云语义分割的目标是将点云中的每个点分配到一些预定义的语义类别中,例如...
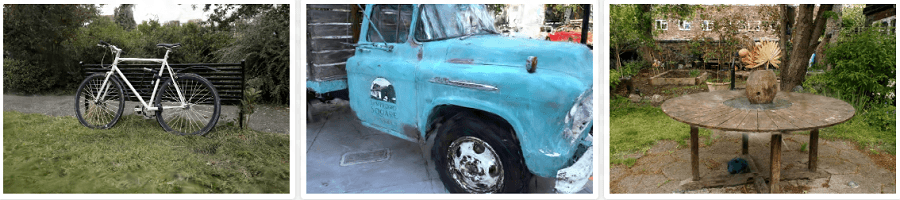
3D Gaussian Splatting 数据压缩【高斯泼溅】
在上一篇文章中,我开始研究高斯泼溅(3DGS:3D Gaussian Splatting)。 它的问题之一是数据集并不小。 渲染图看起来不错。 但“自行车”、“卡车”、“花园”数据集分别是一个 1.42GB、0.59GB...
DALL·E的3D版来了,OpenAI提出Point·E,一个由复杂提示生成三维点云的系统
DALL·E的3D版来了,OpenAI提出Point·E,一个由复杂提示生成三维点云的系统 【写在前面】 虽然最近关于文本条件3D对象生成的工作已经显示出令人振奋的结果,但最先进的方法通常需要多个GPU小时...
3D高斯泼溅三维重建实战【3DGS】
人工智能可能是我们这个时代的主要领域之一,它几乎可以用于从驾驶汽车到医疗保健甚至能够预防失明等所有领域,最近提出了一种新的 3D 重建方法。SNGULAR 及其人工智能团队希望了解有关 3D 重建...
我的面板

看一看

JS网页数据抓取,实现高效采集!
原标题:JS网页数据抓取,实现高效采集! 在互联网时代,数据是非常重要的资源。但是,获取数据并不是一件容易的事情。传统的手动采集方式耗费时间和精力,不利于大规模采集。而JS抓取网页数据...
一句话生成概念图!建筑灵感图创作机器人来了
猜猜上面是哪几位大师的新作? 扎哈?盖里?福斯特? ...... 其实都不是。 上面的“效果图”没有一个是真实渲染的方案, 而是仅用一段文字描述, 通过AI生成的场景概念图。 这一次,小库让你用...

Stable Diffusion怎样训练模型
Stable Diffusion模型是一种在文本到图像生成方面具有很高潜力的模型。本篇文章将介绍如何使用Dreambooth项目进行Stable Diffusion模型训练。从数据准备到模型优化,我们将帮助您掌握和了解训练...
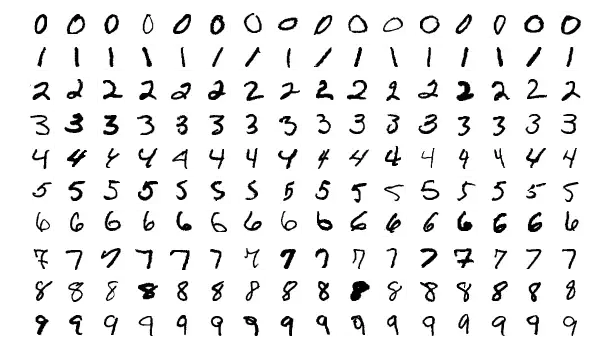
深度学习领域有哪些著名的训练数据集?
通常来说,深度学习的关键在于实践。从图像处理到语音识别,每一个细分领域都有着独特的细微差别和解决方法。 然而,你可以从哪里获得这些数据呢?现在大家所看到的大部分研究论文都用的是专有...

AI作画,一场艺术领域的“智械危机”?曲栅栅:嫁给落魄黄海波,凭《狂飙》走红,赚钱养夫8年苦尽甘来
图片来源@视觉中国 文|刺猬公社,作者|世昕,编辑|园长 从2022年8月开始,AI再度成为舆论焦点。作为一个年经话题,这一次AI走红不再是因为“产生智慧”,也没有“胜天半子”的传奇对决,但仍...
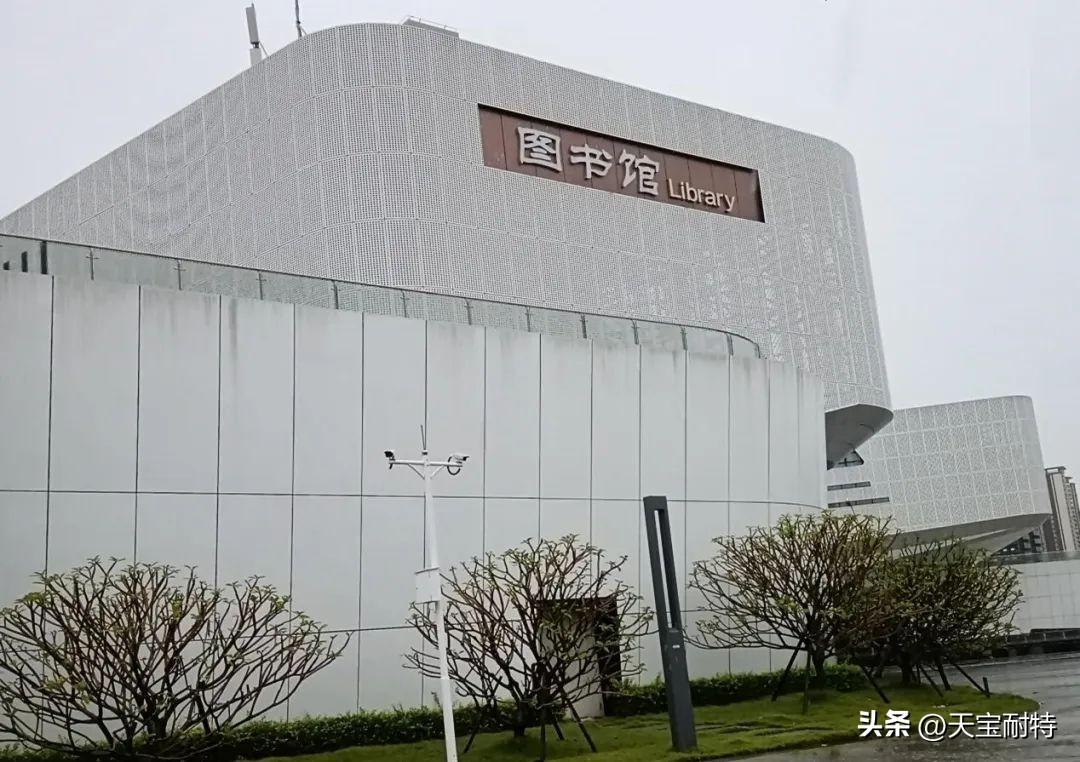
三维激光扫描技术应用于室内三维可视化建模
摘要随着现有各公共场所的利用率及人流量吸引的各大需求,越来越多的街区及商场也在逐步引用着各大高新技术,创建有趣且全面的可视化管理效果,以确保在人流量吸引的同时还能够保障公共场所的安...

