
作者:韩立 | 来源:3DCV
在公众号「3DCV」后台,回复「原论文」可获取论文pdf和代码链接
添加v:dddvision,备注:3D高斯,拉你入群。文末附行业细分群
1、导读
我们介绍了一种从3D Gaussian Splatting表示中快速提取精确且可编辑的网格的方法。该方法利用Gaussian Splatting的渲染速度快、训练速度慢的特点,通过引入正则化项鼓励Gaussian Splatting表示与场景表面对齐,并使用Poisson重建方法从Gaussian Splatting表示中提取网格。此外,该方法还引入了一种优化策略,将Gaussian Splatting表示与网格一起优化,通过Gaussian Splatting渲染实现高效的编辑、雕塑、动画和重新光照。这种方法能够在几分钟内检索到具有更好渲染质量的可编辑网格,相比于从SDF中提取网格的方法需要几个小时。
2、贡献
正则化项,使高斯能准确捕捉场景的几何形状;
一种高效的算法,可在几分钟内从高斯中提取出精确的网格;
一种将高斯绑定到网格的方法,从而获得更精确的网格,与目前使用网格进行新颖视图合成的方法相比,渲染质量更高,并允许以多种不同方式编辑场景。
3、方法
从3D Gaussian Splatting表示中快速提取精确且可编辑的网格的方法。主要包括以下几个步骤:
引入正则化项,鼓励Gaussian Splatting表示与场景表面对齐。
使用Poisson重建方法从Gaussian Splatting表示中提取网格。
引入优化策略,将Gaussian Splatting表示与网格一起优化,实现高效的编辑、雕塑、动画和重新光照。
这个方法的优势在于,能够在短时间内检索到具有更好渲染质量的可编辑网格,相比于从SDF中提取网格的方法,效率大幅提升。
3.1、将高斯与曲面对齐
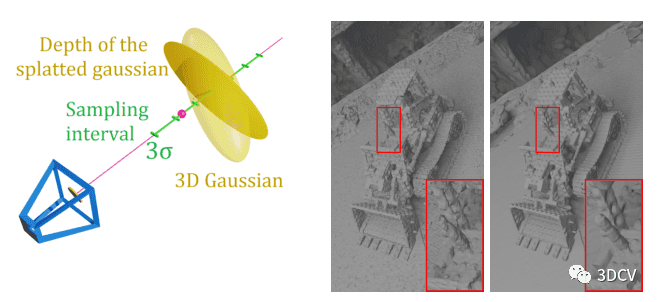
通过引入正则化项来使Gaussian Splatting表示与场景表面对齐。该方法的目标是鼓励Gaussians具有紧密排列和均匀分布的特性,从而在后续的优化过程中获得更高渲染质量的网格。
3.2、高效的网格提取
高效的网格提取:从Gaussian Splatting表示中快速提取精确且可编辑的网格的方法。该方法采用了一种优化策略,将Gaussian Splatting表示与网格一起优化,以实现高效的编辑、雕塑、动画和重新光照。为了证明该方法在重建高质量网格方面的优势,作者进行了实验,并将实验结果与其他网格提取算法进行了比较。
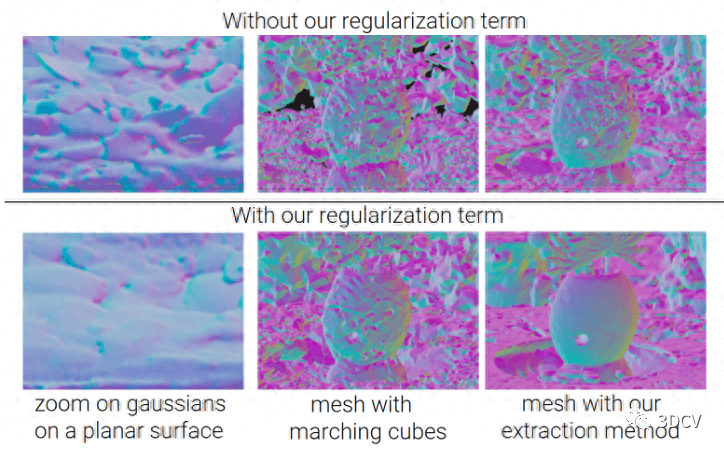
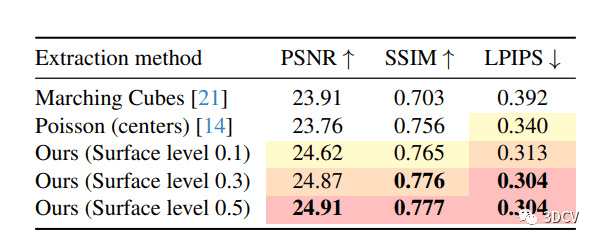
在实验中,作者优化了不同场景的Gaussian Splatting表示,并采用了以下几种网格提取方法:
使用非常精细的Marching Cubes算法提取网格;
使用Poisson重建方法,以高斯体的中心作为表面点云提取网格;
应用本文提出的网格提取方法提取不同场景的网格。
实验结果表明,与其他方法相比,本文提出的网格提取方法在渲染质量和编辑能力方面具有明显优势。在没有正则化项的情况下,Gaussians在优化后没有特殊的排列,这使得提取网格变得非常困难。而当引入正则化项后,即使使用非常精细的3D网格,Marching Cubes也能恢复出非常嘈杂的网格。相比之下,本文提出的全方法能够成功地重建出精确的网格,且效率较高。
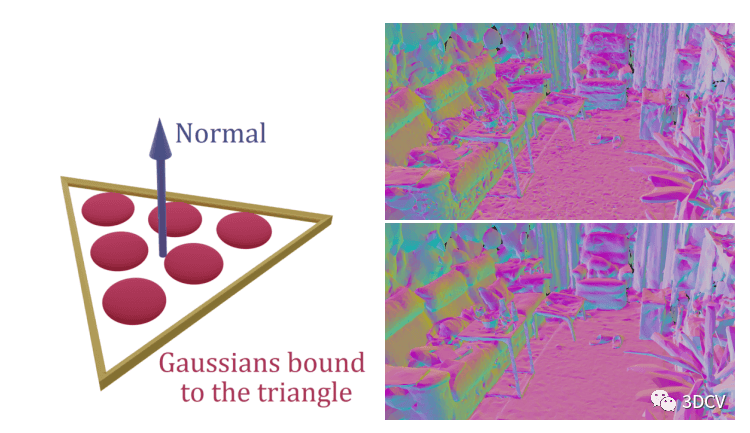
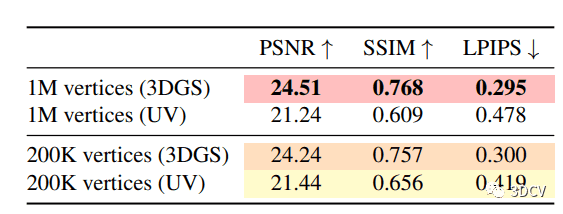
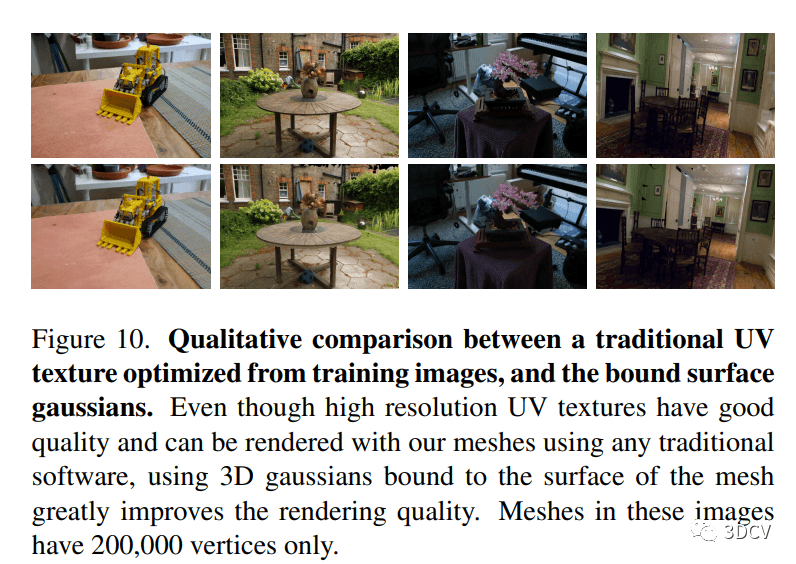
3.3、将新的3D高斯分布绑定到网格上
如何通过将新的3D高斯分布绑定到网格上,来优化和编辑Gaussian Splatting场景。具体来说,主要介绍了以下几个关键点:
在已经提取出的网格的基础上,如何通过绑定新的3D高斯分布来细化和优化网格。
如何在保持高质量渲染的同时,使用高斯分布对网格进行编辑。
如何在几秒钟内从高斯分布中提取出具有更高细节的网格。
4、实验结果
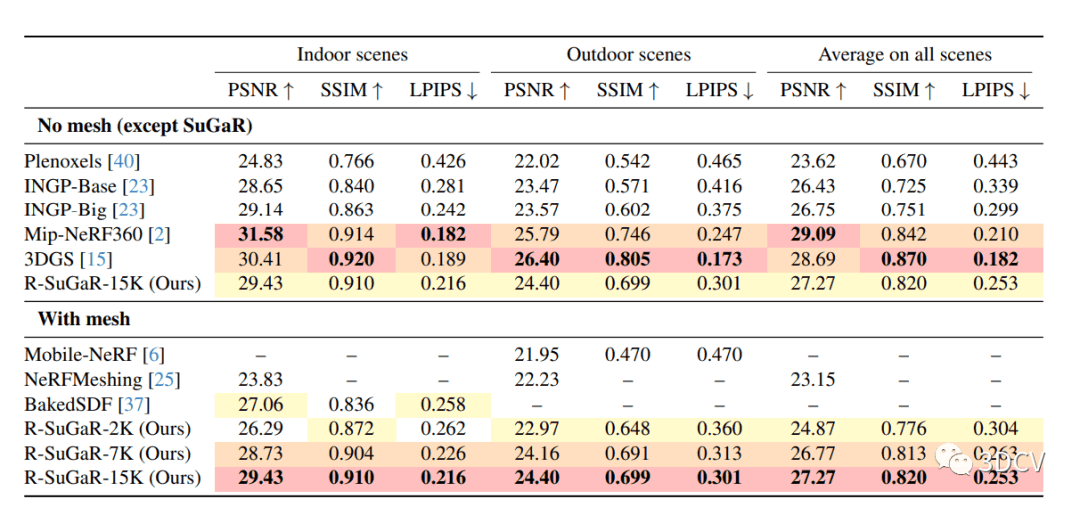
实验对比了几种不同的网格提取方法,如Marching Cubes、Poisson重建等,以及它们在渲染质量和编辑能力方面的表现。为了评估所提出方法在细化和优化网格方面的效果,作者进行了一组对比实验。实验结果表明,所提出的方法在渲染质量和编辑能力方面具有明显优势。作者还对比了在不同场景下,所提出方法与现有方法的性能表现。实验结果显示,所提出的方法在处理3D高斯分布时具有较高的效率和准确性。同时还展示了在不同迭代次数下,所提出方法对3D高斯分布的细化效果。根据迭代次数的不同,细化过程的持续时间从几分钟到几小时不等。
5、总结
所提出的方法在3D Gaussian Splatting表示中快速提取精确且可编辑网格方面的优势。该方法通过引入正则化项鼓励Gaussian Splatting表示与场景表面对齐,并使用Poisson重建方法从Gaussian Splatting表示中提取网格。实验结果表明,所提出的方法在渲染质量和编辑能力方面具有显著提高,能够在短时间内检索到具有更好渲染质量的可编辑网格。与现有方法相比,所提出的方法在处理复杂场景时具有更高的效率和准确性。
3D视觉交流群
大家好,群里会第一时间发布3D计算机视觉方向的最前沿论文解读和交流分享,主要方向有:
视觉SLAM、激光SLAM、ORB-SLAM、Vins-Fusion、LOAM/LeGo-LOAM、cartographer、VIO、语义SLAM、滤波算法、多传感器融合、多传感器标定、MSCKF、动态SLAM、MOT SLAM、NeRF-SLAM、FAST-LIO、LVI-SAM、LIO-SAM、事件相机、GPS/RTK/UWB/IMU/码盘/TOF(iToF、dToF)、激光雷达、气压计、毫米波雷达、RGB-D相机、超声波等、机器人导航、相机标定、立体匹配、三维点云、结构光(面/线/散斑)、机械臂抓取(2D/3D)、2D缺陷检测、3D缺陷检测、6D位姿估计、相位偏折术、Halcon、光场重建、摄影测量、阵列相机、偏振三维测量、光度立体视觉、激光雷达、NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图、深度估计、Transformer、毫米波/激光雷达/视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、目标检测、3D目标检测、路径规划、轨迹预测、3D点云、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪、四旋翼建模、无人机飞控、求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产品等综合交流群。
添加v: dddvision,备注:研究方向+学校/公司+昵称(如3D点云+清华+小草莓), 小助理会拉你入群。


















暂无评论内容