
随着计算机视觉和空间信息技术的不断发展,三维场景重建是获取空间信息的重要途径。三维场景重建所涉及的领域有计算机科学、数据融合、图像处理等多个学科,且多学科之间相互交叉。目前,三维场景重建技术在众多领域都发挥着重要的作用,包括地理建筑、电子地图、影视制作、游戏开发等领域。例如,利用三维重建技术可在3D电影、游戏中塑造很多奇幻逼真的画面,这些场景可使观众获得身临其境的视觉感受。另外,随着近几年“数字城市”的兴起,在打造三维智慧城市模型时,城市建筑物的重建也需要三维场景重建技术的支撑。
三维重建是指对三维物体建立适合计算机表示和处理的数学模型,是在计算机环境下对三维物体进行处理、操作和分析的基础,也是在计算机中表达客观世界的虚拟现实的关键技术。
据了解,WIMI微美全息开发了基于图像、点云融合的三维重建算法系统。从多幅图像中提取点云信息与已获得的点云信息进行数据配准融合。基于点云信息和图像信息融合来进行三维模型重建,能够发挥两种信息的优势特点,提供准确丰富的真实感模型信息。
WIMI微美全息基于图像、点云融合的三维重建算法系统主要包括三部分:
(1)数据获取程序,获取目标模型多视点云和图像信息;
(2)信息提取程序,对于序列图像能够实现特征提取和匹配、相机矩阵计算、稠密重建等功能;
(3)点云处理程序,进行点云配准和异源点云融合。根据载入视点信息预计算理论转移矩阵。利用从图像中提取的运动信息辅助点云进行配准,然后进行异源点云的融合。
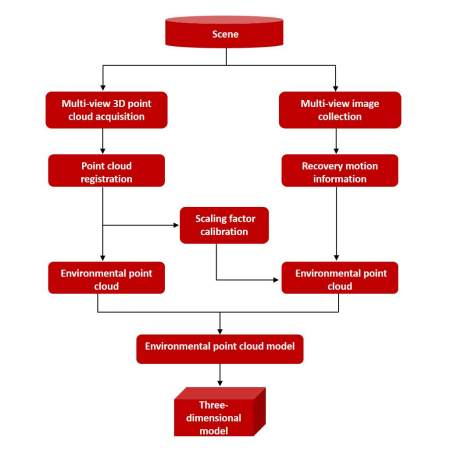
对于点云配准的目的是将同一个环境下在不同方位获取到的同一目标的两片点云进行对准匹配,从而获得完整的环境模型信息。在配准流程中,通过对环境目标进行多视点点云、图像同步采集,获取初始信息。
获得初始信息后,从图像序列计算得到运动信息,经过稠密重建,获得环境3D点云,同时在此过程中完成尺度因子的标定。然后在融合点云后得到最终的环境点云模型,经表面重建后得到三维场景模型。
其中,在信息提取阶段,主要涉及特征提取、匹配获得特征点以及相机外参标定等技术,一方面相机的外参数标定主要利用提取的特征点对信息进行数学解算得到,另一方面特征点对的数量及精度是后续重建过程的基础。采集或者融合得到点云数据后,需要采用适当的算法对采集到的点云数据进行预处理,然后对处理后的点云进行表面重建。而稠密重建是在稀疏点云的基础上进行稠密匹配,进一步利用图像信息,获得丰富点云。
三维场景重建技术发展至今已成为重要的计算机技术,从重建单一物体到多个物体,从小型目标到大型目标甚至室外场景,其对于三维目标场景的颜色信息与空间距离信息的获取与融合已经达到非常高的准确度,其在建筑工程、智能机器人、娱乐游戏等领域得到了广泛的应用。WIMI也将不断拓展其基于图像、点云融合的三维重建算法系统的运用领域,构建真实场景与虚拟空间的桥梁,助力塑造真实的数字世界。















暂无评论内容