2023年06月的文章 第6页
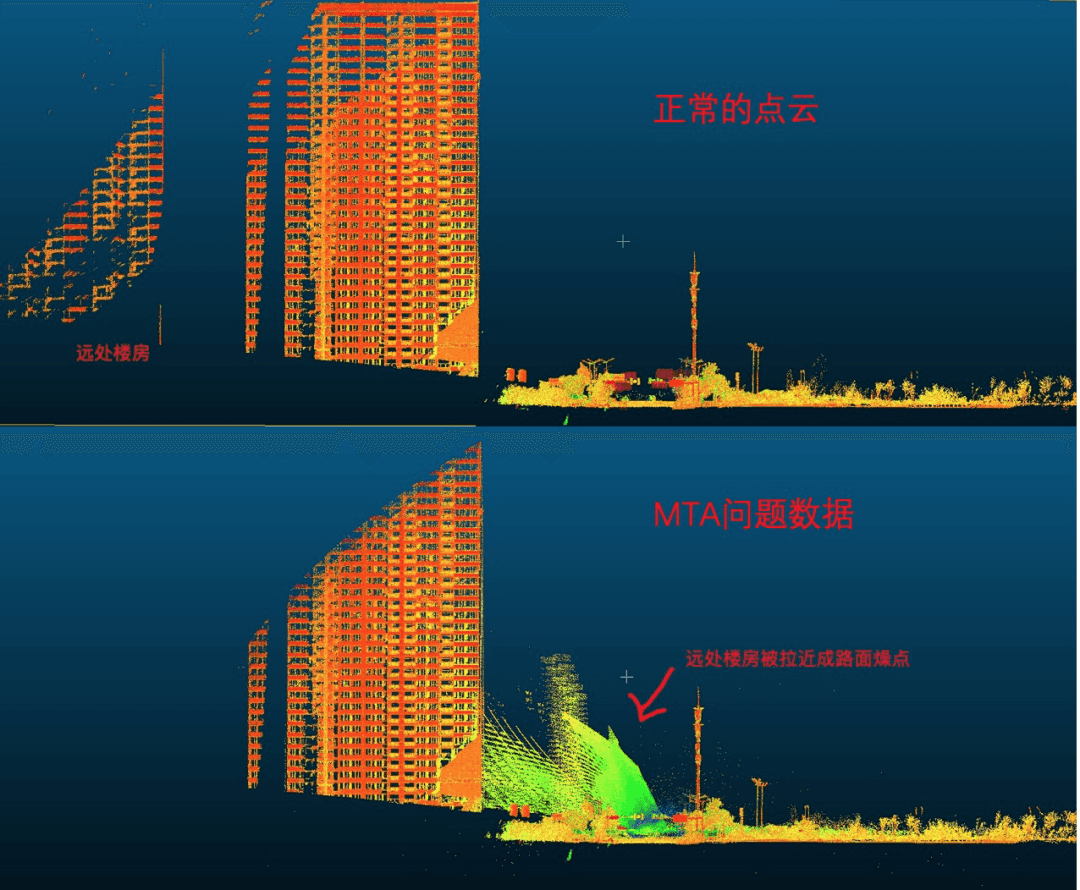
高精地图技术专栏 | 基于空间连续性的异常3D点云修复技术
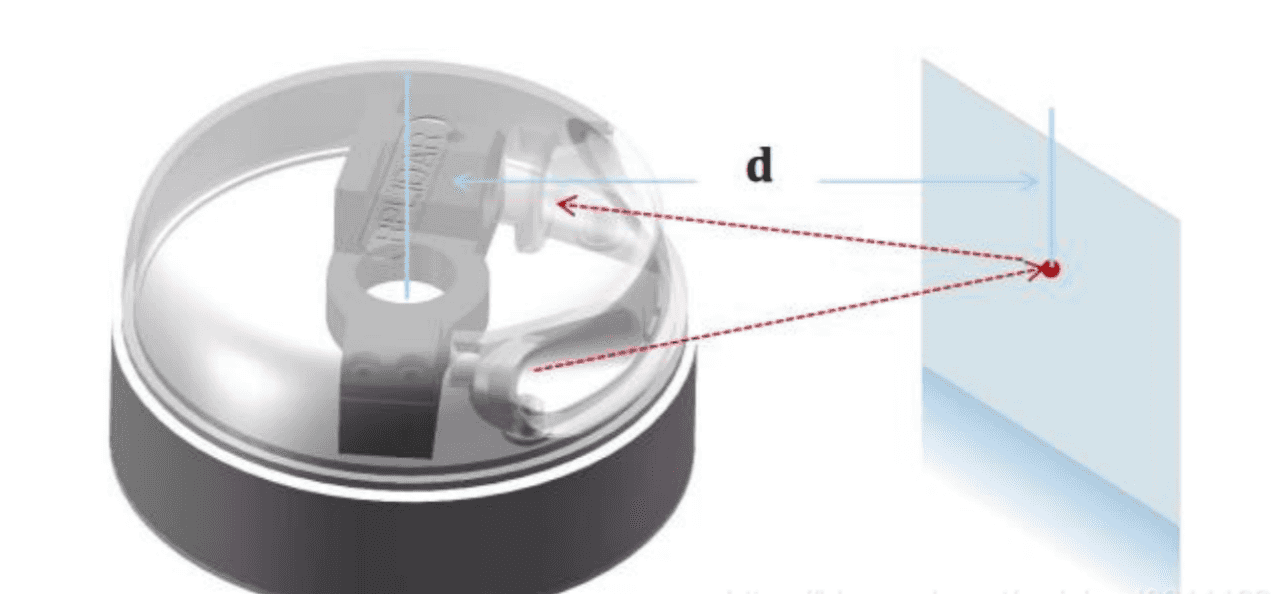
简介: 我们需要通过激光的内部机制和数据处理算法,将这些噪声恢复到它本来的位置。本文会从MTA问题产生的原理、激光应对MTA的内部机制、数据处理算法三方面来介绍高精资料处理是如何解决这个...

一看就会!无人机点云模型处理(附视频教程)
随着中国科技的崛起,以 DJI 为首的「 无人机 」覆盖面也越来越广,从亲民的 2000 多元级别至行业用的数万元级别,各个价位都能找到对应的产品。 目前小编在用的是「 精灵 4RTK 」,所有本文章...
3D点云之点云数据介绍
一、点云数据简介 点云数据(point cloud data)是指在一个三维坐标系统中的一组向量的集合。扫描资料以点的形式记录,每一个点包含有三维坐标,并且可以携带有关该点属性的其他信息,例如颜色...
点云数据怎么编辑、检测、区分?
点云数据是指在一个三维坐标系统中的一组向量的集合。这些向量通常以X,Y,Z三维坐标的形式表示,而且一般用来代表物体或产品的外表面形状。此外,点云数据也可以表示一个点的RGB颜色,灰度值,深...
十大点云数据处理技术梳理
研究点云数据时,感觉无从下手? 看看这十大点云数据处理技术,换个思路学点云。 点云 · 定义 简言之,在获取物体表面每个采样点的空间坐标后,得到的是一个点的集合,称之为“点云”。包括三...
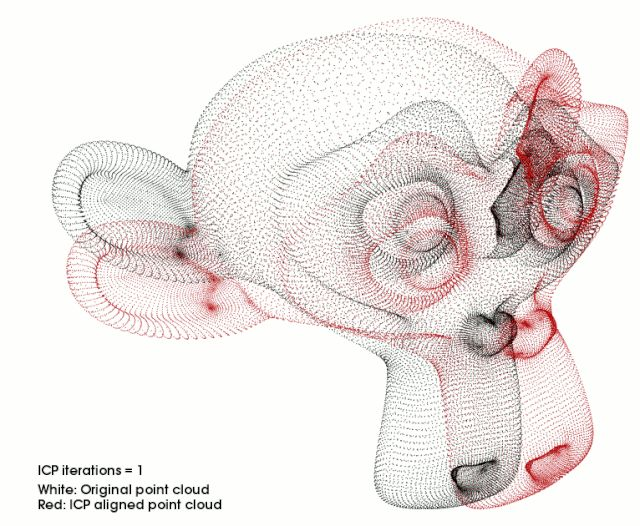
一分钟详解PCL中点云配准技术
原文首发于微信公众号「3D视觉工坊」:一分钟详解PCL中点云配准技术 本文是对前两篇文章:点云配准(一 两两配准)以及3D点云(二 多福点云配准)的补充,希望可以在一定程度上帮助大家对点云...

