2023年06月的文章 第5页
点云数据怎么生成三维模型?
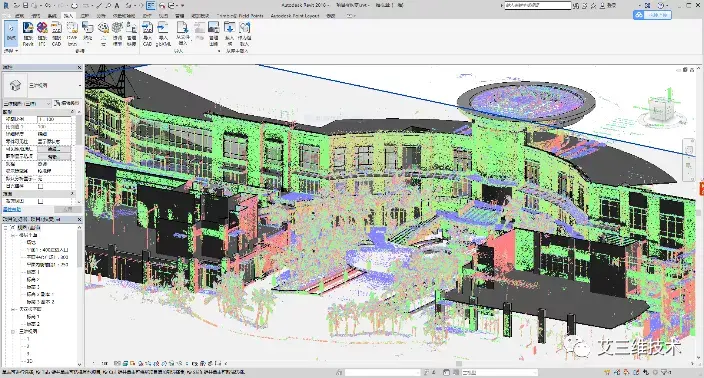
点云”(Point Cloud)简单来说,就是通过测量仪器在获取物体表面每个采样点的空间坐标后,得到的是一个点的集合。 通常使用三维坐标测量机所得到的点数量比较少,点与点的间距也比较大,叫稀疏点...
关于激光点云逆向建模
随着上世纪九十年代,三维激光扫描技术的出现,点云概念开始被提及。 点云是目标表面特性的海量点集合,点云越密集,反映的图像细节和信息就越多。 当我们利用三维激光扫描仪扫描某一建筑表面时...

tetgen 使用说明 点云建模的利器
导读:tetgen是一款非常优秀的3D网格剖分软件,主要面向四面体网格。是一个德国的华人写的。整个程序包才2.2M,解压缩后为6.3M。非常小。 但是功能特别强大。一直没时间使用过。最近详细读了tet...
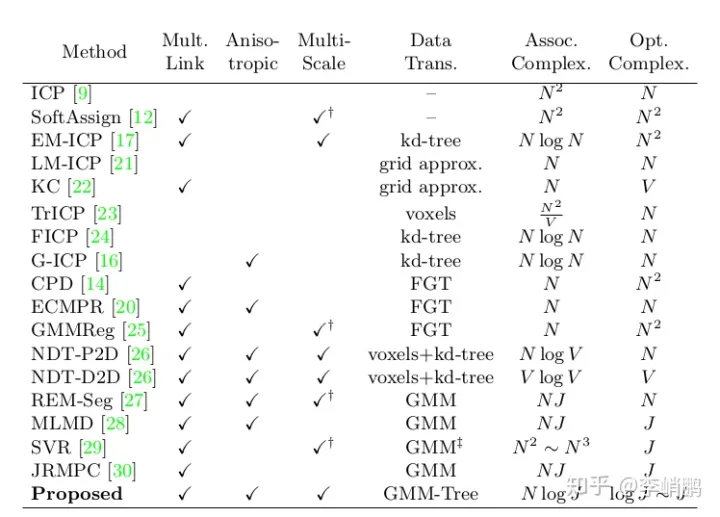
基于高斯混合模型树的点云建立和配准(2)
19. Evangelidis, G.D., Kounades-Bastian, D., Horaud, R., Psarakis, E.Z.: A generative model for the joint registration of multiple point sets. In: ECCV 2014. (2014) 109– 122 2, 3,...

10 分钟 2 公里 | 大疆 L1 激光雷达城区配网点云建模示范
在电网运维向智能化、数字化迈进的过程中,三维点云数据模型的重要性日益凸显。基于三维点云模型,运维单位可以搭建设备信息管理数据库,实现线路可视化、数字化;还可规划无人机自动化飞行航线...
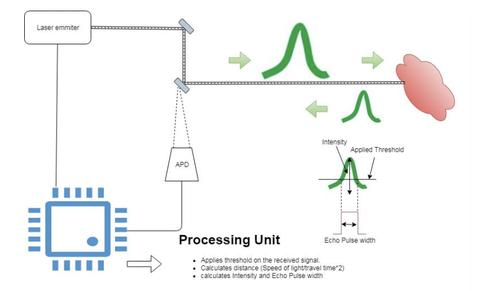
端到端传感器建模生成激光雷达点云
发表在SIGAI的翻译文章: SIGAI:端到端传感器建模生成激光雷达点云14 赞同 · 0 评论文章 注:这是一篇2019年7月发表在arXiv的论文【1】,如题目所言是对激光雷达传感器的仿真建模,以生成3D点...

