
一、点云数据简介
点云数据(point cloud data)是指在一个三维坐标系统中的一组向量的集合。扫描资料以点的形式记录,每一个点包含有三维坐标,并且可以携带有关该点属性的其他信息,例如颜色、反射率、强度等。点云数据通常由激光扫描仪、相机、三维扫描仪等设备获取,可以用于三维建模、场景重建、机器人导航、虚拟现实和增强现实等应用中。
点云数据的主要特点是具有高精度、高分辨率和高维度的几何信息,可以直观地表示空间中的物体形状、表面和纹理等信息。点云数据的处理和分析通常需要使用计算机视觉和计算机图形学的技术,例如点云滤波、配准、分割、重建、识别和分类等。
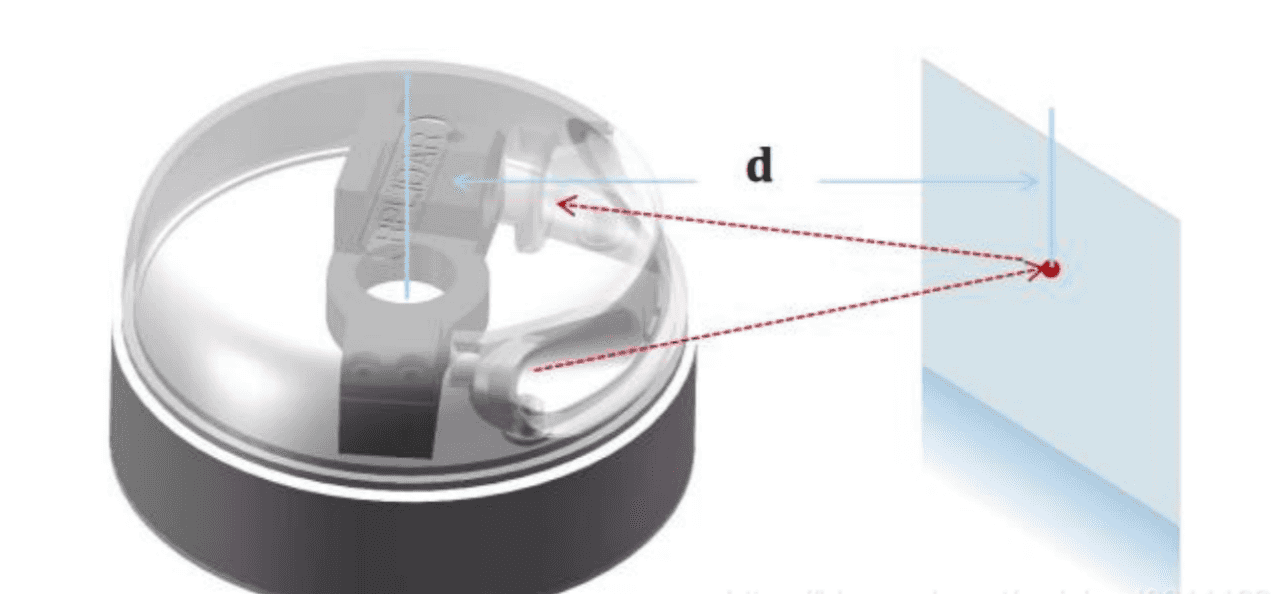
我们常用的点云数据为激光雷达采集的数据,激光雷达的非接触式测量特点,具有测量速度快、精度高、识别准确等优点,是移动机器人定位导航的核心传感器。在激光雷达技术领域中,目前主要通过三角测距法与TOF方法来进行测距。三角法测距法通过激光束在物体表面上形成的光点在激光雷达内部的光学传感器上的位置进行三角计算以测量距离。
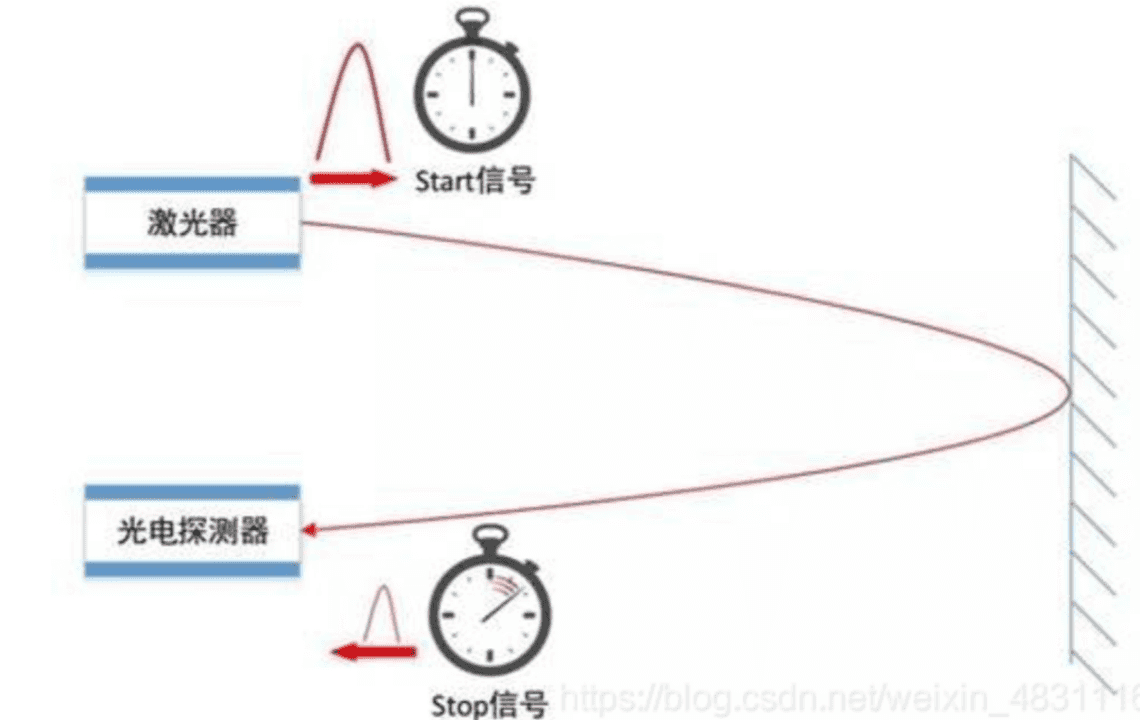
TOF(Time of flight)法则是利用激光的脉冲信号的飞行时间来计算距离。同时,激光雷达的非接触式测量确实具有快速、高精度和准确性等优点,可以被用于移动机器人的导航和定位等应用。
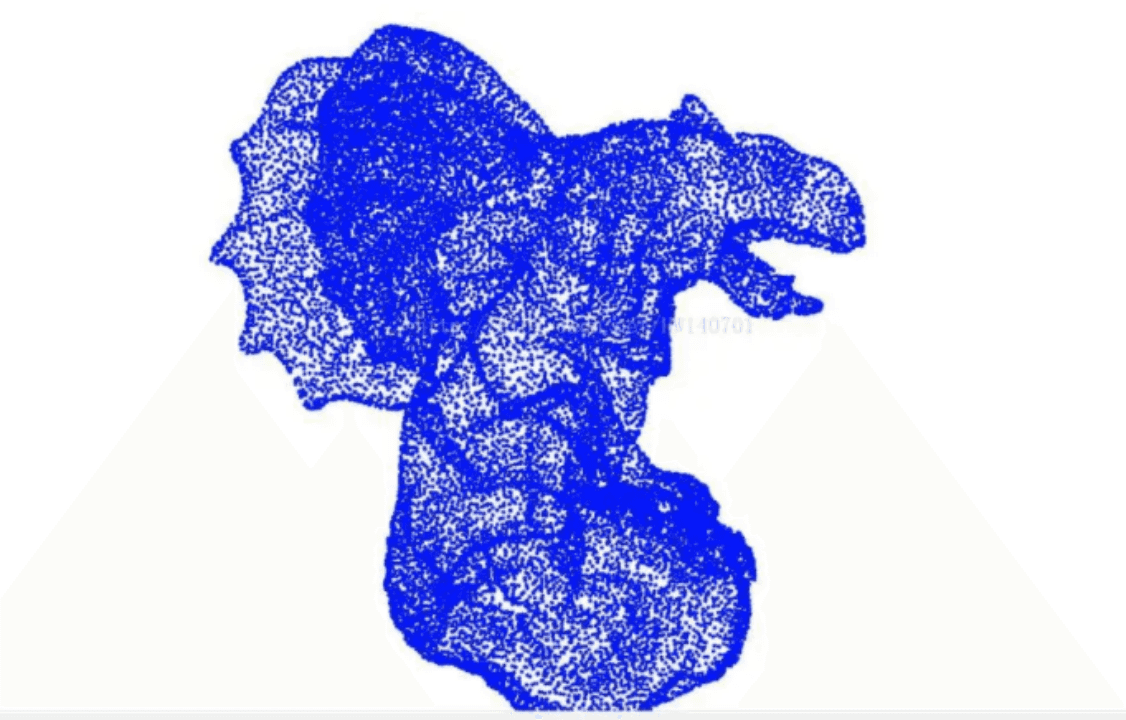
激光雷达每发射并接收一次,便可采集一个点的数据,因此点云数据可以看作是许多个三维坐标点构成的集合。与图像数据相比不同的是,点云数据没有明确的纬度和排列顺序,因此可以看作是一列列零散的点组成的。点云数据和图像数据都是数字化的数据形式,但是它们描述的对象和形态不同。图像数据可以看作是二维平面上的像素值,而点云数据则是三维空间中的坐标点,这是它们之间的本质区别。
二、点云数据的应用
1、点云分割
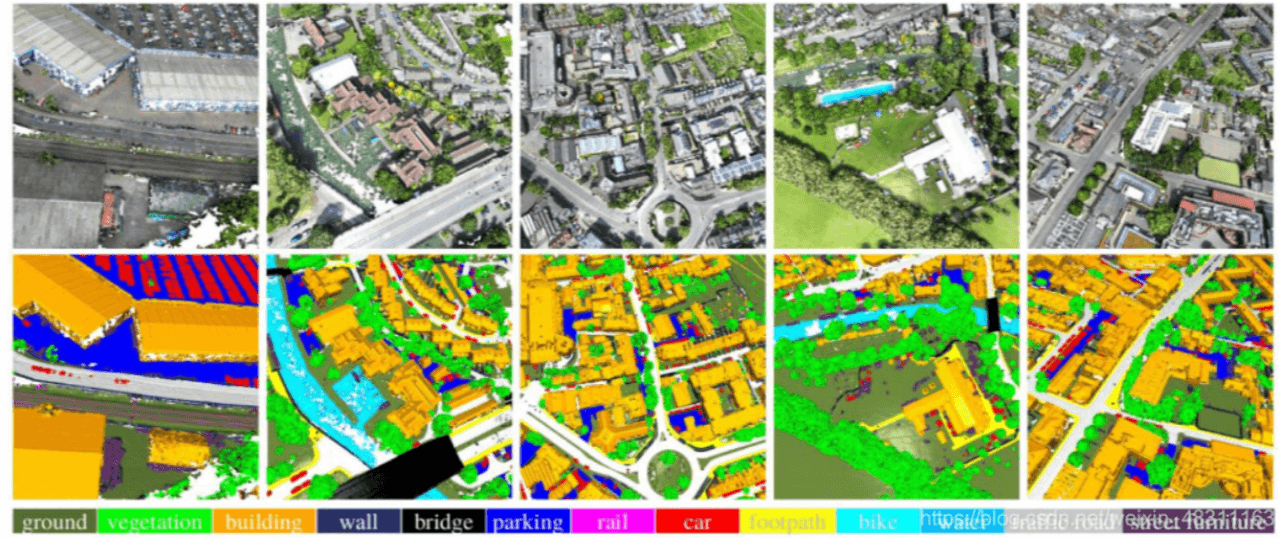
点云分割是指将点云数据中的点按照其所属的不同对象或区域进行分类和分割的过程。点云分割通常需要对点云数据进行预处理,例如去除噪点、降采样等,以减少噪声和数据量,从而提高分割的效率和准确性。
点云分割的应用十分广泛,例如在三维建模、物体识别和跟踪、自动驾驶、机器人视觉和虚拟现实等领域中都有应用。点云分割的方法通常包括基于几何形状的方法和基于特征的方法两种。基于几何形状的方法主要依据点云的形状、尺寸、位置等几何特征进行分割;而基于特征的方法则是利用点云的局部特征、表面纹理、颜色等信息来进行分割。
点云分割的算法包括传统的基于模型匹配的方法、基于聚类的方法和深度学习方法。传统的基于模型匹配的方法通常需要先构建目标物体的模型,并将其与采集的点云数据进行匹配,从而识别出目标物体的位置和姿态。基于聚类的方法则是将点云数据中的点按照其相似性进行聚类,以得到不同的对象或区域。深度学习方法则是利用卷积神经网络(CNN)等深度学习模型对点云数据进行分割。这些方法各有优缺点,可以根据具体应用场景选择合适的方法。
2、点云补全
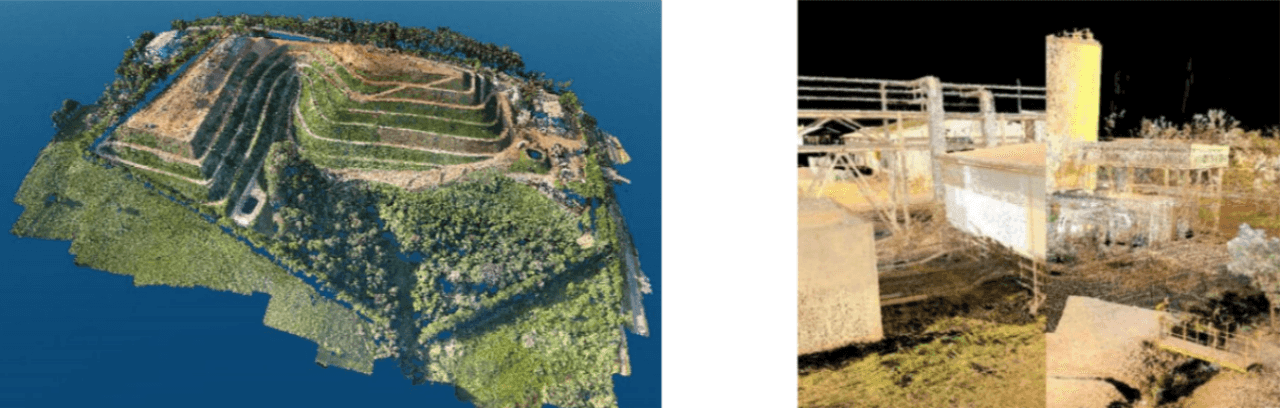
点云补全是指通过使用计算机算法和技术,将不完整的点云数据集合补全成为完整的三维模型的过程。通常情况下,采集到的点云数据会受到物体遮挡、传感器误差等因素的影响而出现不完整的情况。点云补全旨在恢复点云数据中缺失的部分,从而生成完整的三维模型,以便后续的处理和应用。

点云补全技术可以通过多种途径实现,包括传统的几何算法和深度学习方法。在传统的几何算法中,点云补全主要是基于点云的形状、结构和拓扑等特征进行分析和处理,以构建合理的模型。常用的算法包括Poisson重建、Marching Cubes等。而在深度学习方法中,点云补全则是利用卷积神经网络(CNN)等深度学习模型对点云数据进行补全。这些方法通常需要先对点云数据进行预处理,例如去噪、降采样等,以减少噪声和数据量,从而提高补全的效率和准确性。
点云补全技术在各种领域都有应用,例如在三维建模、医学影像、机器人视觉等方面都有广泛的应用。点云补全技术的发展将会极大地促进三维视觉和计算机视觉领域的发展。
3、点云生成
点云生成是指通过多种途径获取三维空间中的点云数据,使得这些点云数据能够被计算机处理和应用。点云生成的方法包括激光雷达、立体视觉、结构光等。
1.激光雷达:激光雷达是一种使用激光束扫描物体表面并测量返回激光的时间和强度的传感器。激光雷达通过发射激光束,经过反射后接收反射光,从而获取目标物体表面的点云数据。激光雷达可以采集高精度的三维数据,广泛应用于机器人导航、三维地图构建等领域。
2.立体视觉:立体视觉是通过两个摄像机同时拍摄同一物体,通过计算两个摄像机之间的位移和角度等参数,从而确定物体表面上每个点的三维坐标。立体视觉可以采集高精度的点云数据,但受限于环境和摄像机等因素的影响。
3.结构光:结构光是通过投射光栅或者编码的光条等结构光源照射目标物体表面,利用相机对光栅图案的反射或者光条形变等信息,计算目标物体表面上每个点的三维坐标。结构光可以采集较高精度的点云数据,但要求被测物体表面有光滑的反射特性。
在实际应用中,需要根据具体的场景和任务选择合适的点云生成方法,从而得到满足需求的三维数据。
4、点云目标检测
点云目标检测是指在三维点云数据中自动检测和识别目标物体的过程,是机器视觉和自动驾驶领域的重要任务之一。
点云目标检测的主要流程包括:点云预处理、点云特征提取、目标检测与分类、后处理与结果输出。
1.点云预处理:点云数据需要进行预处理,包括去除噪点、采样、滤波等操作。去除噪点可以通过统计学方法、曲率估计等方式实现,采样和滤波可以减少点云数据的冗余信息和噪声干扰。
2.点云特征提取:通过点云的几何和拓扑属性来提取特征,常见的方法包括基于形状的特征、基于法向量的特征、基于表面曲率的特征等。这些特征可以用于描述点云中目标物体的形状、大小、方向等属性。
3.目标检测与分类:利用深度学习等方法来对点云数据进行目标检测和分类,目前常用的方法包括基于2D投影的方法、基于3D框架的方法和基于点云分割的方法等。其中,基于3D框架的方法更适用于三维目标检测,可以直接在点云空间中建立3D框架来定位和分类目标物体,基于点云分割的方法则是先将点云分割成小块再进行目标检测。
4.后处理与结果输出:将检测到的目标物体进行后处理,如非极大值抑制、聚类等操作,以提高检测的精度和效率。最后输出检测结果,一般以三维框架或点云语义分割的形式展示。
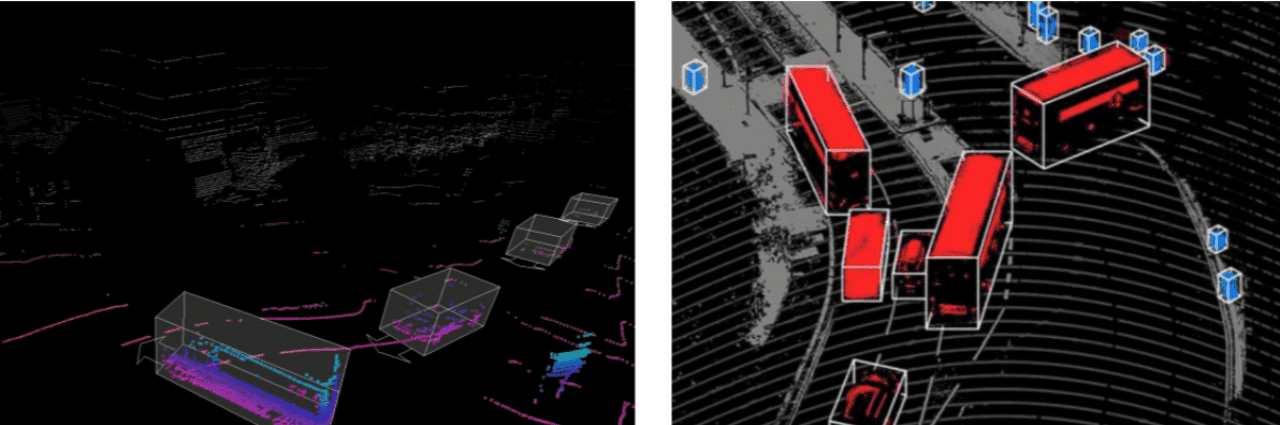
点云目标检测的应用场景广泛,如自动驾驶中的交通标志检测、行人检测等,机器人导航中的障碍物检测等。随着深度学习技术的不断发展,点云目标检测也将成为机器视觉和自动驾驶领域的重要研究方向。
5、点云配准
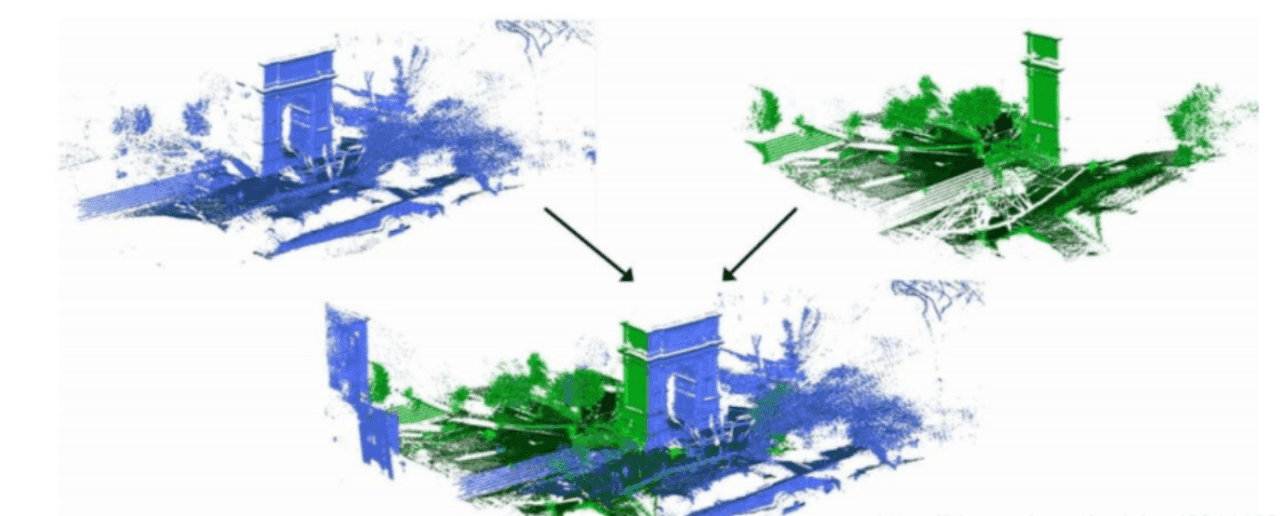
点云配准是指将多个不同视角或位置采集的点云数据进行对齐的过程,使得它们可以在同一个坐标系下表示同一个场景或物体。点云配准是很多三维计算机视觉任务的基础,如建模、目标识别和导航等。
点云配准的主要流程包括:特征提取、特征匹配、变换估计和点云变换。
1.特征提取:从每个点云数据中提取出描述点云局部特征的特征描述子。这些特征描述子通常包括点的法向量、曲率、颜色和形状等信息,通过这些信息可以确定点云数据的几何特征。
2.特征匹配:在特征空间中,将每对点云数据中的特征描述子进行匹配,找到两个点云数据中相对应的点对。常用的匹配算法包括基于最近邻搜索的暴力匹配算法、基于局部描述子相似度的特征匹配算法等。
3.变换估计:通过已匹配的点对,使用常见的变换模型(如刚性变换、仿射变换、非刚性变换等)估计两个点云数据之间的相对姿态变换。在变换估计中,通常使用最小二乘法或最大似然法求解变换参数。
4.点云变换:根据估计得到的变换参数,将其中一个点云数据变换到另一个点云数据的坐标系下,使得两个点云数据在同一坐标系下对齐。变换后的点云可以通过拼接等操作用于建立三维模型、场景重建等应用。
点云配准的精度和鲁棒性取决于特征提取和匹配的效果。不同场景下,特征的选择和匹配方法会有所不同。例如,在低纹理的场景中,基于颜色的特征匹配效果不佳,而基于形状的特征匹配可以取得较好的结果。随着深度学习和神经网络的发展,点云配准的效果和速度也在不断提高。
内容部分参考CSDN博主「-从心」
关注公众号“智能制造趋势”,获取更多行业信息。

















暂无评论内容