
随着上世纪九十年代,三维激光扫描技术的出现,点云概念开始被提及。
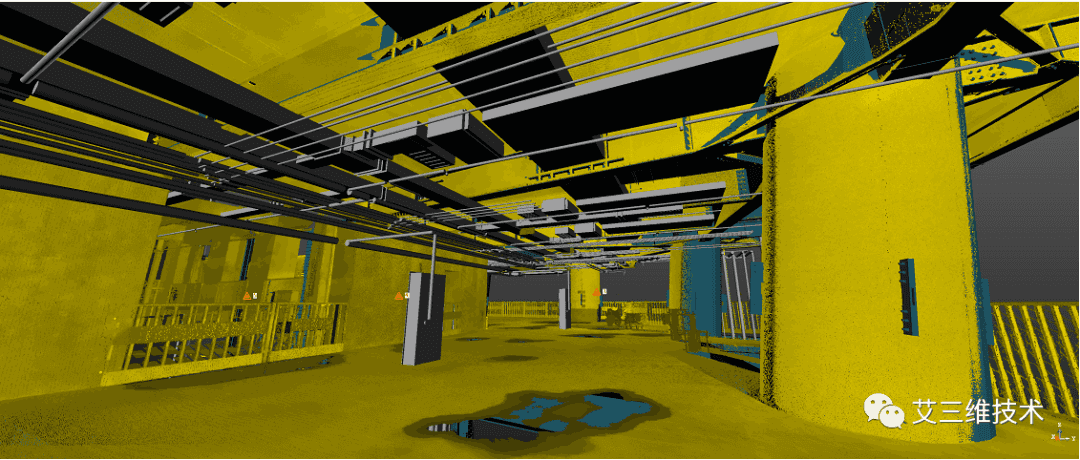
点云是目标表面特性的海量点集合,点云越密集,反映的图像细节和信息就越多。
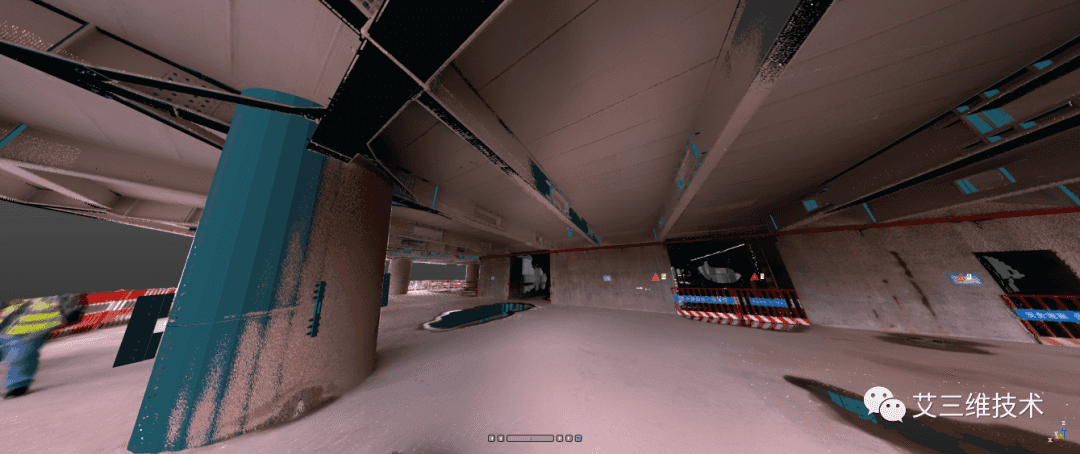
当我们利用三维激光扫描仪扫描某一建筑表面时,我们可以得到大量密集的点,这些点带有三维坐标(XYZ)、激光反射强度和和颜色信息(RGB)等信息,它们共同创建了可识别的三维结构。
一.如何创建点云
目前,点云的获取方式一般是通过三维激光扫描仪,三维激光扫描仪通过扫描选定的目标物体或环境后,能大面积高分辨率地快速获取被测对象表面的三维坐标数据。
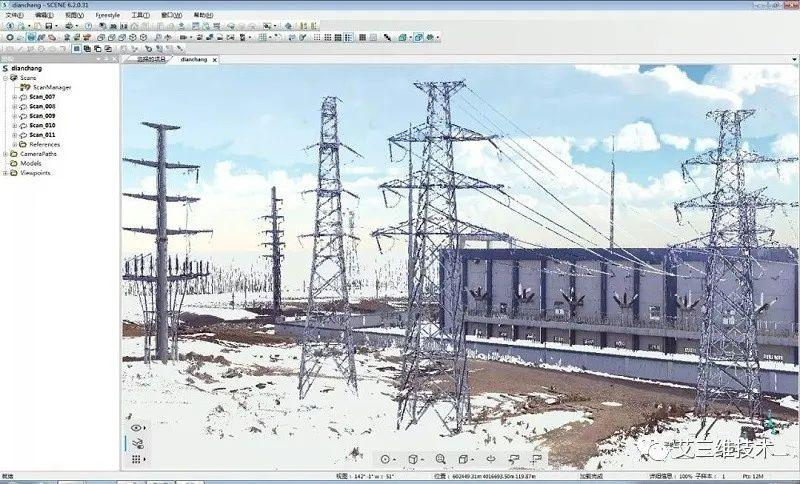
下面,我们以Trimble三维激光扫描仪为例,一起来看下点云数据的具体创建过程。
Trimble三维激光扫描仪主要扫描过程和技术流程如下:
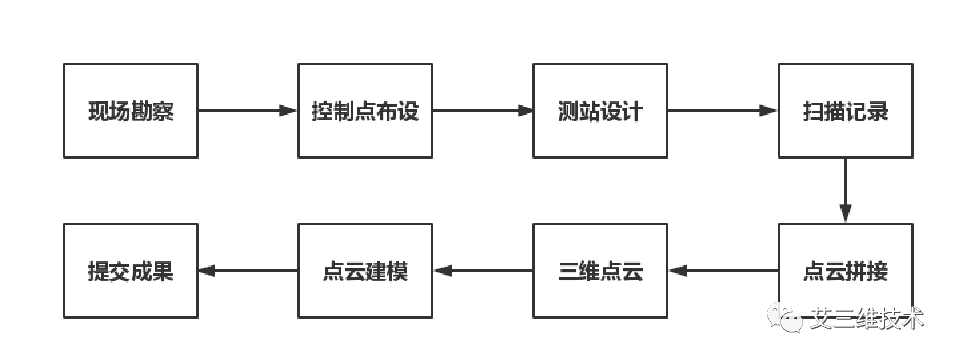
Trimble三维激光扫描仪最终采集的数据以点云和图像的形式储存在扫描仪设备里,运用Trimble RealWorks进行一定处理后,能获取建筑物的相对位置信息、尺寸、纹理和形状,进而建立真实的物体数据模型。
Trimble三维激光扫描仪:三维激光扫描仪的工作原理和六大技术特点
二.点云数据处理
在三维激光扫描的过程中,点云数据的获取常常会受到物体遮挡、光照不均匀等因素的影响,容易造成复杂形状物体的区域扫描盲点,形成孔洞。同时由于扫描测量范围有限,对于大尺寸物体或者大范围场景,不能一次性进行完整测量,必须多次扫描测量,因此扫描结果往往是多块具有不同坐标系统且存在噪声的点云数据,不能够完全满足人们对数字化模型真实度和实时性的要求,所以需要对三维点云数据进行去噪、简化、配准以及补洞等预处理。
通过数据预处理,可以有效剔除点云中的噪声和外点,在保持几何特征的基础上实现点云数据简化,并将不同角度扫描的点云统一到同一坐标系下,为后续的曲面构建及三维实体模型生成提供稳健的数据基础。
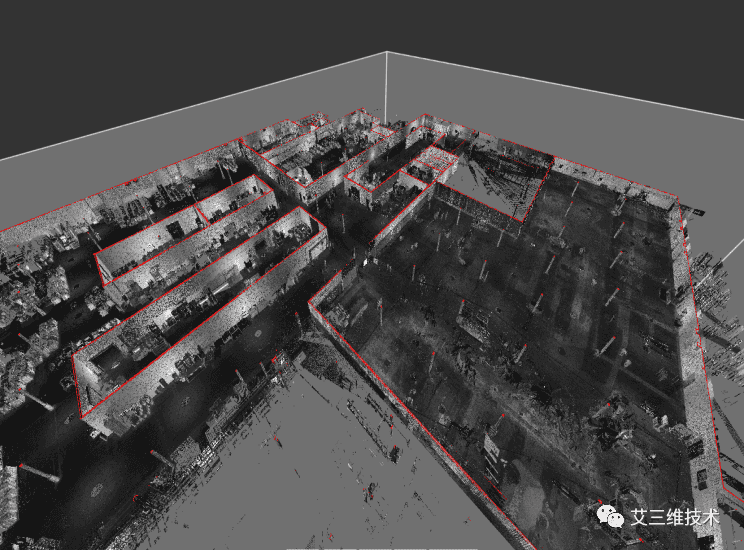
1.数据配准
点云数据配准,又称为点云拼接或坐标纠正,是点云数据处理时最主要的数据处理之一。由于目标物的复杂性,通常需要从不同方位扫描多个测站,才能把目标物扫描完整,每一测站扫描数据都有自己的坐标系统,要获得完整的数据必需把不同测站的扫描数据纠正到统一的坐标系下,这就需要点云拼接。
2.数据去噪
在利用三维激光扫描仪扫描目标时,会受到扫描设备、周围环境、人为扰动、目标特性等影响,使得点云数据无法避免的存在一些噪点,导致数据无法正确表达扫描对象的空间位置。
噪声点主要分为三类:
1)由于物体表面材质或光照环境导致反射信号较弱等情况下产生的噪点;
2)由于扫描过程中,人、车辆或其他物体从扫描仪器与物体之间经过而产生的噪点;
3)由于测量设备自身原因,如扫描仪精度、相机分辨率等引起的系统误差和随机误差。
3.数据精简
数据精简就是在精度允许下减少点云数据的数据量,提取有效信息。一般分为两种:去除冗余与抽稀简化。
冗余数据是指在数据配准之后,其重复区域的数据,这部分数据的数据呈大,多为无用数据,对建模的速度以及质量有很大影响,对于这部分数据要予以去除。
抽稀简化是指扫描的数据密度过大,数量过多,其中一部分数据对于后期建模用处不大,所以在满足一定精度以及保持被测物体几何特征的前提下,对数据进行精简。以提高数据的操作运算速度、建模效率以及模型精度。
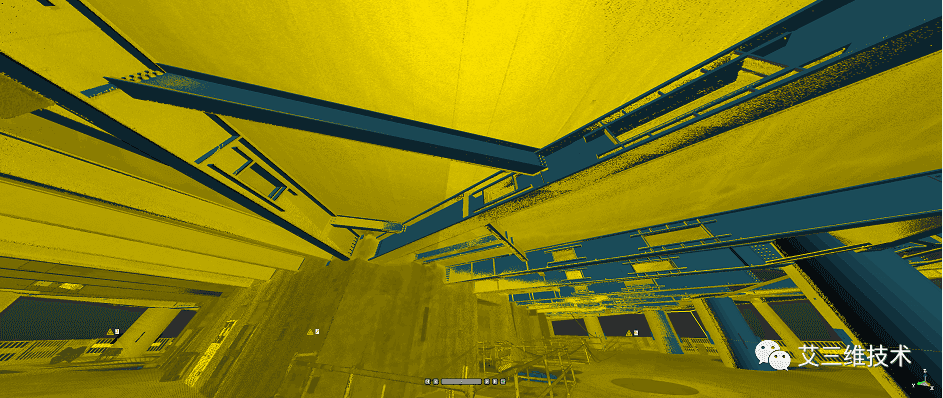
4.数据分割
对于较为复杂的扫描对象,如果直接进行点云数据建模,会使得建模过程十分困难,三维模型的数学表达变得复杂。所以对于复杂的建模对象,我们一般会进行点云数据分割,然后再分别建模,最后再进行组合。

点云数据分割应该遵守以下准则:
1)分块区域的特征单一且同一区域内没有法矢量及曲率的突变;
2)分割的公共边尽量便于后续的拼接;
3)分块的个数尽量少,可减少后续的拼接复杂度;
4)分割后的每一块要易于重建几何模型。
三.逆向建模
逆向建模(Reverse Modeling)是逆向工程的一个分支,是基于现实中存在的实物通过扫描进行逆向建模的一种方式。
逆向建模技术中包括:点云逆向建模、照片逆向建模、三维扫描逆向建模等技术。无论是照片逆向建模、雷达扫描逆向建模、激光扫描逆向建模最先生成的都是点云,通过对点云的疏密度及空间位置的计算从而生成三维模型这个过程叫点云转三维模型,最后将纹理映射到三维模型上,生成一个完整的三维模型。
逆向建模是一种不同的建模思路,但是无论采用哪种逆向建模的技术,都需要相应的设备,生成的模型经过修改后能适用于各个场景。
逆向建模的应用非常的广泛。前期扫描获得的点云数据可以应用在地理信息服务、测绘工程服务、大型勘探辅助、户外大型项目宣传检测等。
激光点云数据处理及逆向建模具体教程:
1.点云模型处理:
点云分割点云分类2. 点云建模:
建模软件建模方式建模插件介绍关注“艾三维技术”微信公众号,查看激光点云逆向建模教程。
四.点云建模和应用
利用三维激光扫描技术获取的空间点云数据,既可用于建立结构复杂、不规则场景的三维可视化模型,又可以用于生成数字高程模型(DEM),用于土方计算、检测地质灾害等。
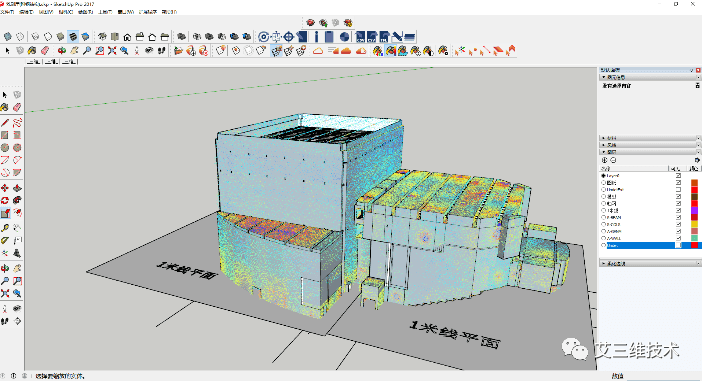
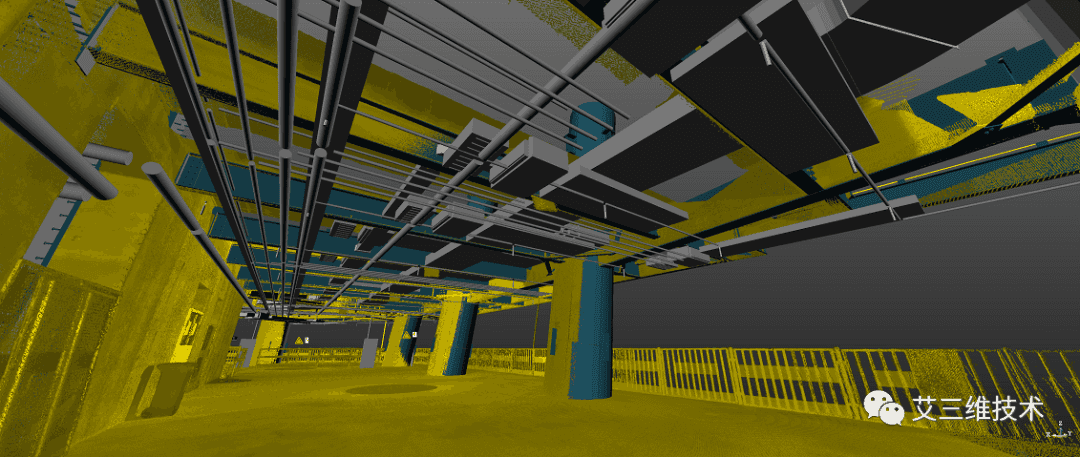
1.点云三维建模
点云建模需要利用三维实景建模软件ContextCapture,ContextCapture可以更好地评估点云并生成更精确的工程模型。
ContextCapture可以对点云进行增强、分割、分类,并与工程模型相结合。利用ContextCapture的高级三维建模、横截面切割、断裂线和地形提取功能,能快速高效地对竣工条件进行建模并支持设计流程。
ContextCapture软件详情:实景建模ContextCapture产品详情及五大应用
ContextCapture建模具体过程,请关注“艾三维技术”微信公众号,查看软件教程。
2.数字高程模型(DEM)
利用获取的点云数据,通过噪声点处理后进行栅格化,可以生成高质量的数字表面模型(DSM)。
同时,通过对点云数据自动化预处理,再利用人工编辑进行地面滤波,滤除其中的非地面点,剩余的地面点通过构建不规则三角网(TIN)等模型进行栅格化,可得到高精度的数字高程模型(DEM)数据,也可以转换为等高线数据。
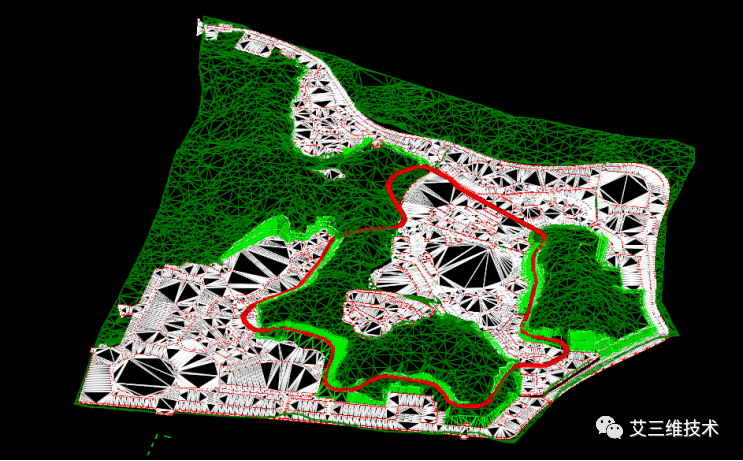
利用点云生成的DEM模型,可以用来进行土方计算、检测地质灾害等。
1)土方计算
通过激光扫描仪得到的高精度激光点云,可用于构建地形三维模型,为勘察设计提供断面量测、坡度坡向量测、土方填挖量等信息,大大减少工程勘察设计中的外业工作量,缩短工作周期。
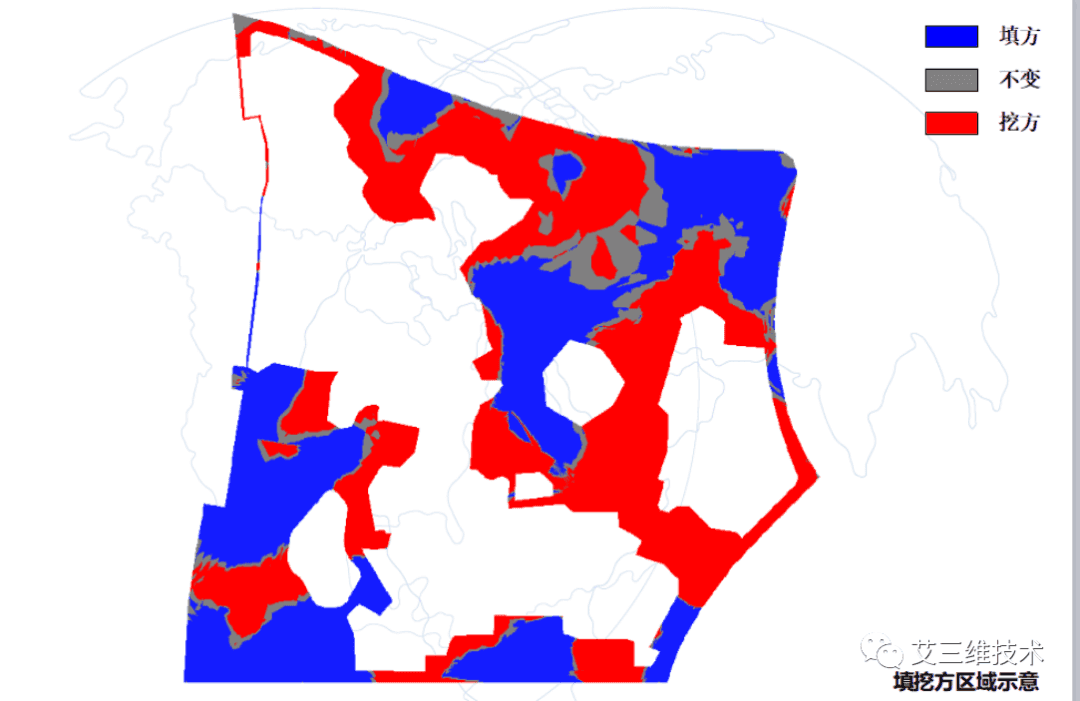
2)监测地质灾害
通过地形三维模型的建立,大面积监测地形的变化,将在不同时间点扫描的点云进行比较,以作出风险评估,为预防地质灾害的发生提供依据。
如果您有激光点云逆向建模项目需求,或想采购天宝激光扫描仪/实景建模软件ContextCapture,欢迎关注“艾三维技术”微信公众号,联系我们。















暂无评论内容