
随着中国科技的崛起,以 DJI 为首的「 无人机 」覆盖面也越来越广,从亲民的 2000 多元级别至行业用的数万元级别,各个价位都能找到对应的产品。
目前小编在用的是「 精灵 4RTK 」,所有本文章以此为例为大家讲一些基础的「 无人机点云处理 」,前期飞行上的由于各位机型可能都不一样,所有就不一一赘述了,详情可以各自参考大疆飞行学院里所属的机型操作教学。
无人机打开五项飞行,设定范围,设定重叠率后选择起飞,航拍完毕后,正式开始点云模型的处理。

本次用到的软件为「 ContextCapture Center Master 」,下面为流程操作的录屏。
最后导出格式的时候请按照「 各自需求选择 」,本次是打算给 3DMAX 使用,所有导出为 FBX,若是为了测算面积和高程或是方便观看,请选择 .3mx 格式。模型的精度是根据航拍的照片数量,以及覆盖的测绘面,相机的精度多方面来确定的,有时候还会收到阳光阴天的影响。

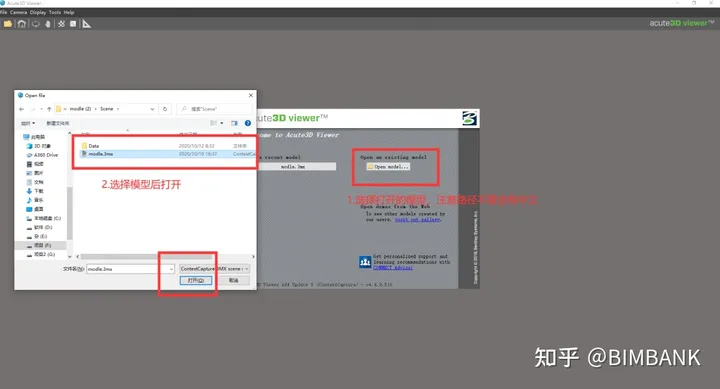
若导出为 3.mx 格式,可以使用 Acute3D Viewer 来打开,此软件安装 ContextCapture Center Master 时会一并下载。

这样基本操作就能差不多了,是不是很简单呢?你学会了嘛?
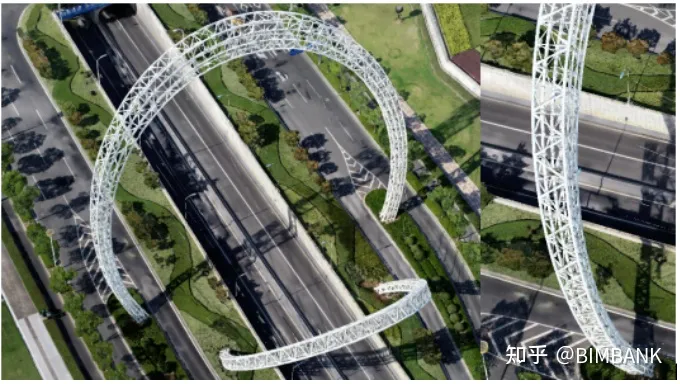
稍微再提一点「 进阶操作 」,若是要测量建筑单体,单单选择五项飞行,建筑物的下次大都是拍不清楚的,导致模型会非常模糊就比如

这个是因为照片都是高视角俯视,有「 高差 」的情况下,重叠面就不足了。若是单个建筑,可以尝试从下往上环绕飞行,第一步还是一样,沿着建筑物外边缘设定测量范围,然后从下到上把各个高度都环绕拍摄一边。高度按建筑的高度以及测量范围来确定。
这里是提供本人飞行的一个小思路,欢迎在评论区讨论。
文 | bimerSS
编辑 | Shirley
来源 | BIMBANK
转载请联系授权(微信ID:BIMBANKchina)
















暂无评论内容