摘要
YOLOv8 是最新的最先进的 YOLO 模型,可用于对象检测、图像分类和实例分割任务。YOLOv8 由 Ultralytics 开发的一个前沿的 SOTA 模型,它在以前成功的 YOLO 版本基础上,引入了新的功能和改进,进一步提升了其性能和灵活性。下面将分析 YOLOv8 的改进以及如何在 MSCOCO2017 数据集上训练 YOLOv8。
YOLOv8 性能预览
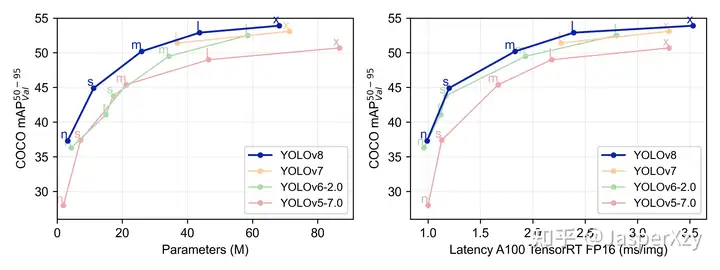
yolo_comparison_plots
不难看出,YOLOv8 的性能比 YOLO 的其他模型在参数数量相似的情况下都具有更好的精度。
YOLOv8 的改进与创新
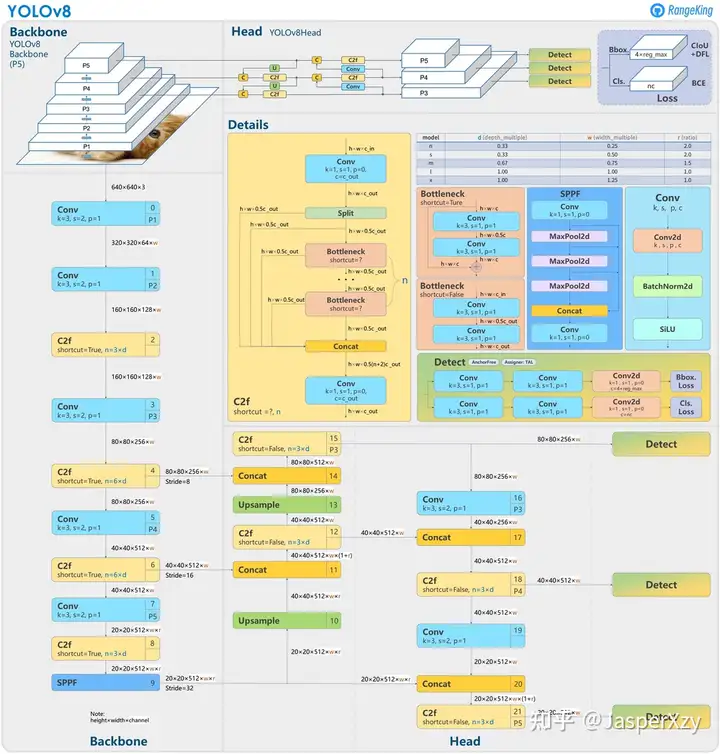
yolov8_structure
YOLOv8 的改进与创新有以下几点:
1. Head
Head 部分的变化最大,YOLOv5 采用耦合头(Coupled Head)和 Anchor Based 策略,YOLOv8 选择解耦头(Decoupled Head)和 Anchor Free 策略,不再有之前的 Objectness 分支,只有解耦的分类和回归分支。由于使用了 DFL 的思想,因此回归头的通道数也变成了 4 * reg_max 的形式。
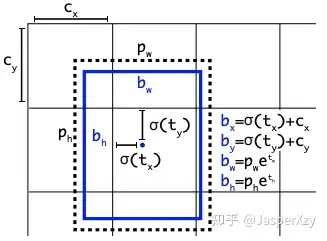
众所周知,锚框是早期 YOLO 模型中的棘手部分,因为它们可能代表目标基准框的分布,而不是自定义数据集的分布。YOLOv8抛弃了以往的 Anchor Base,使用了 Anchor Free 的思想。所以,YOLOv8 是一个无锚模型,这意味着它直接预测对象的中心而不是已知锚框的偏移量。Anchor Free 检测减少了框预测的数量,从而加速了非最大抑制(NMS)。
anchor_box
2. Backbone
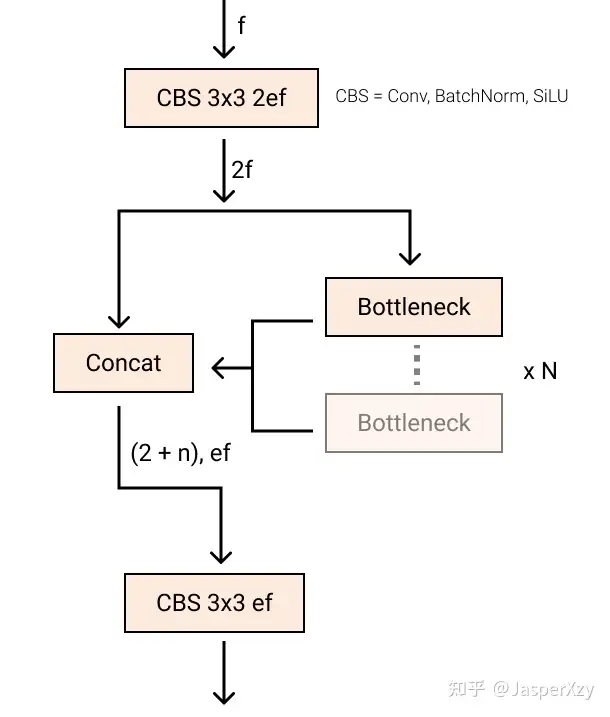
YOLOv5 中的 C3 模块被替换成了 C2f 模块,就是参考了 C3 模块以及 ELAN 的思想进行的设计,实现了进一步的轻量化,还能获得更加丰富的梯度流信息,同时 YOLOv8 依旧使用了 YOLOv5 等模型中使用的 SPPF 模块。模块总结如下图所示,其中 “f” 是特征数量,“e” 是膨胀率,CBS 是由 Conv、BatchNorm 和 SiLU 组成的块。在 C2f 中,第一个 6 x 6 转换被 3 x 3 取代。在 C2f 中,所有输出(两个残差连接的 3 x 3 卷积)被连接起来,而在 C3 中,只使用最后一个输出。
yolov8_c2f
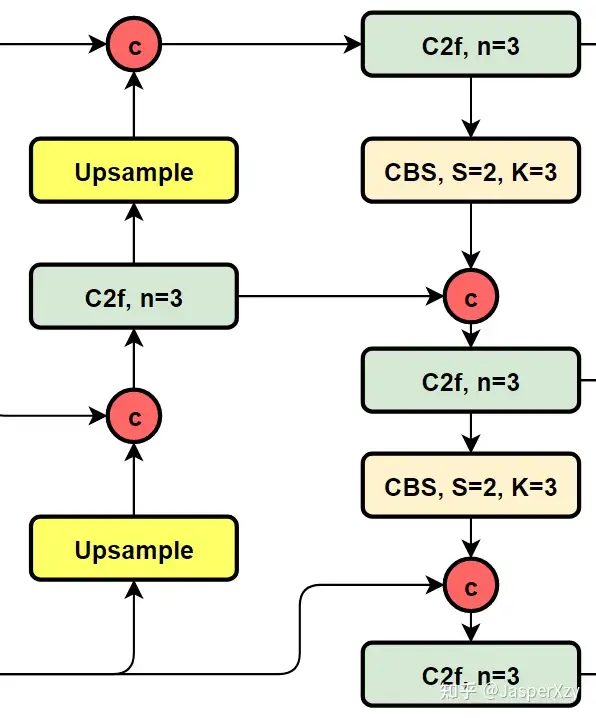
3. PAN FPN
YOLOv8 将 C3 模块和 RepBlock 替换为了 C2f 模块,同时 YOLOv8 选择将上采样之前的 1 × 1 卷积去除,将 Backbone 不同阶段输出的特征直接送入了上采样操作。
pan fpn
4. 损失函数
YOLOv8 的分类损失为 VFL Loss(VarifocalNet: An IoU-aware Dense Object Detector),回归损失为 CIOU Loss(Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection) + DFL 的形式,Reg_max 默认为16。 DFL(Si,Si+1)=−((yi+1−y)log(Si)+(y−yi)log(Si+1)) {\rm{DFL}}({S_i},{S_{i + 1}}) = – (({y_{i + 1}} – y)\log ({S_i}) + (y – {y_i})\log ({S_{i + 1}}))
5. 样本匹配
YOLOv8 抛弃了以往的 IOU 匹配或者单边比例的分配方式,而是使用了 Task Aligned Assigner 匹配方式。
为与 NMS 搭配,训练样例的 Anchor 分配需要满足以下两个规则:
正常对齐的 Anchor 应当可以预测高分类得分,同时具有精确定位;不对齐的 Anchor 应当具有低分类得分,并在 NMS 阶段被抑制。基于上述两个目标,Task Aligned 设计了一个新的 Anchor alignment metric 来在 Anchor level 衡量Task Alignment 的水平。并且,Alignment metric 被集成在了 sample 分配和 loss function 里来动态的优化每个 Anchor 的预测。
Anchor alignment metric: t=sα×uβ t = {s^\alpha } \times {u^\beta } s 和 u 分别为分类得分和 IoU 值,α 和 β 为权重超参数。t 可以同时控制分类得分和 IoU 的优化来实现 Task Alignment,也可以引导网络动态的关注于高质量的Anchor。
YOLOv8 训练
本文将使用 MSCOCO2017 数据集在 YOLOv8 上训练。
1. 安装环境
YOLOv8 需要 3.10 >= Python >=3.7,PyTorch >=1.7,本文使用 Python 3.8.10,PyTorch 1.11.0 + cu113。
本文运行环境为:Ubuntu 20.04 TLS,60 Cores,120 GB Menory,4 x NVIDIA A5000 24 GB
目前 YOLOv8 核心代码都封装在 ultralytics 这个依赖包里面,可以通过 pip(推荐)或 git clone 来安装。
pip install ultralytics
2. 数据集
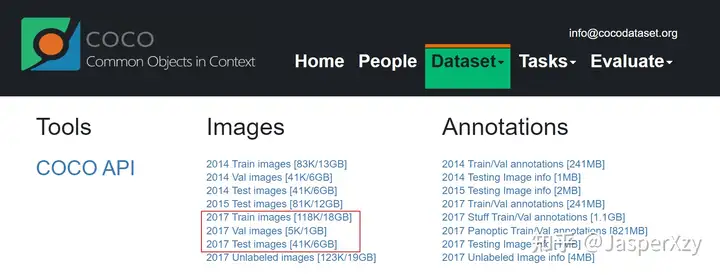
首先,下载 MSCOCO2017 数据集与 COCO labels。
download_dataset
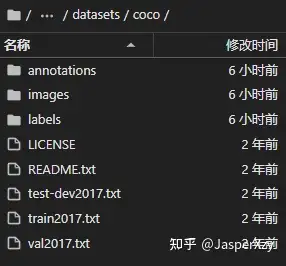
将 train2017.zip,test2017.zip,val2017.zip 解压至 images 下,coco2017labels.zip 解压至 labels 下,数据集目录应为:
coco2017
–iamges
—-test2017
—-train2017
—-val2017
–labels
—-test2017
—-train2017
–test-dev2017.txt
–train2017.txt
–test2017.txt
content_path
在你想要存放运行文件的目录下新建一个 coco.yaml,将 path 后的地址改为存放 MSCOCO 数据集的目录。
path:/root/deep_learning/datasets/coco # dataset root dirtrain:train2017.txt # train images (relative to path) 118287 imagesval:val2017.txt # val images (relative to path) 5000 imagestest:test-dev2017.txt # 20288 of 40670 images, submit to https://competitions.codalab.org/competitions/20794# Classesnames:0:person1:bicycle2:car3:motorcycle4:airplane5:bus6:train7:truck8:boat9:traffic light10:fire hydrant11:stop sign12:parking meter13:bench14:bird15:cat16:dog17:horse18:sheep19:cow20:elephant21:bear22:zebra23:giraffe24:backpack25:umbrella26:handbag27:tie28:suitcase29:frisbee30:skis31:snowboard32:sports ball33:kite34:baseball bat35:baseball glove36:skateboard37:surfboard38:tennis racket39:bottle40:wine glass41:cup42:fork43:knife44:spoon45:bowl46:banana47:apple48:sandwich49:orange50:broccoli51:carrot52:hot dog53:pizza54:donut55:cake56:chair57:couch58:potted plant59:bed60:dining table61:toilet62:tv63:laptop64:mouse65:remote66:keyboard67:cell phone68:microwave69:oven70:toaster71:sink72:refrigerator73:book74:clock75:vase76:scissors77:teddy bear78:hair drier79:toothbrush
3. 下载预训练模型
在 YOLOv8 的 GitHub 网址上下载对应版本的预训练模型,若想从头开始训练,则可以定位到 site-packages/ultralytics/models/v8 下选择相应的 yaml 文件。
content_path
4. 训练
yolo task=detect mode=train model= …
task,mode 为必选参数,其他可选参数如下:
model: # path to model file, i.e. yolov8n.pt, yolov8n.yaml
data: # path to data file, i.e. i.e. coco128.yaml
epochs: 100 # number of epochs to train for
patience: 50 # epochs to wait for no observable improvement for early stopping of training
batch: 16 # number of images per batch (-1 for AutoBatch)
imgsz: 640 # size of input images as integer or w,h
save: True # save train checkpoints and predict results
cache: False # True/ram, disk or False. Use cache for data loading
device: # device to run on, i.e. cuda device=0 or device=0,1,2,3 or device=cpu
workers: 8 # number of worker threads for data loading (per RANK if DDP)
project: # project name
name: # experiment name
exist_ok: False # whether to overwrite existing experiment
pretrained: False # whether to use a pretrained model
optimizer: SGD # optimizer to use, choices=[SGD, Adam, AdamW, RMSProp]
verbose: True # whether to print verbose output
seed: 0 # random seed for reproducibility
deterministic: True # whether to enable deterministic mode
single_cls: False # train multi-class data as single-class
image_weights: False # use weighted image selection for training
rect: False # support rectangular training
cos_lr: False # use cosine learning rate scheduler
close_mosaic: 10 # disable mosaic augmentation for final 10 epochs
resume: False # resume training from last checkpoint
主要填写 :
model # 预训练模型或初始模型路径
data # 上文 coco.yaml 的路径
epochs # 迭代轮数
batch # 根据显存调节
device # 调用显卡数量,如:0,1,2,3
workers # 调用 cpu 核心数)
resume # 是否为断点续训,若是,则需把 model 路径改为上次保存的 best.pt 的路径
例如:
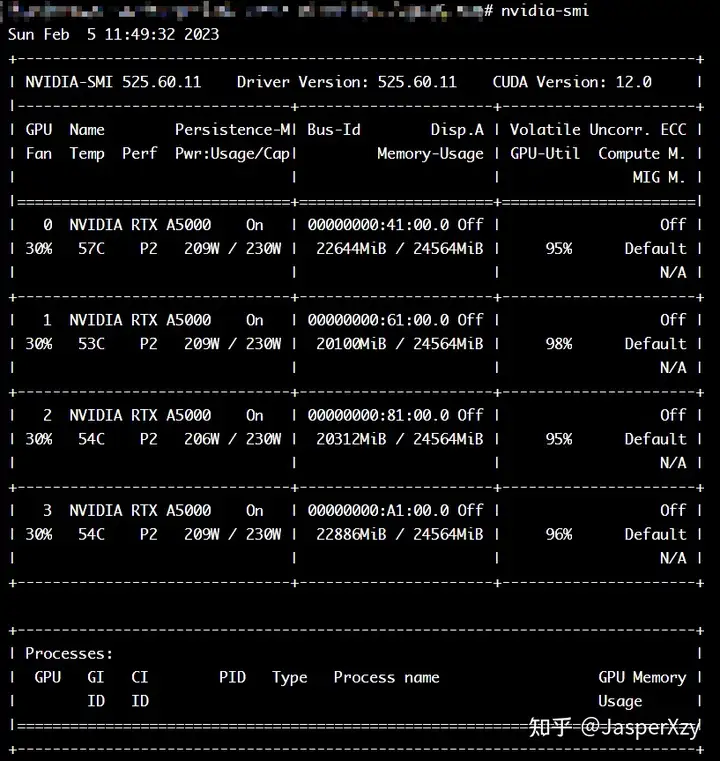
yolo task=detect mode=train model=yolov8n.pt data=coco.yaml epochs=100 batch=256 device=0,1,2,3 workers=56 resume=False
nvidia-smi
可以通过 Tensorboard 查看运行过程,将 {path} 改为 train 文件夹的绝对路径。
tensorboard –logdir={path}
tensorboard
5. 导出模型
训练完成后,会在运行目录下的 runs/detect/train/weights 目录下生成 best.pt 文件,此文件为训练出的最好的模型文件。
YOLOv8 测试
yolo task=detect mode=predict source=…
task,mode 为必选参数,其他可选参数如下:
source: # source directory for images or videos
show: False # show results if possible
save_txt: False # save results as .txt file
save_conf: False # save results with confidence scores
save_crop: False # save cropped images with results
hide_labels: False # hide labels
hide_conf: False # hide confidence scores
vid_stride: 1 # video frame-rate stride
line_thickness: 3 # bounding box thickness (pixels)
visualize: False # visualize model features
augment: False # apply image augmentation to prediction sources
agnostic_nms: False # class-agnostic NMS
classes: # filter results by class, i.e. class=0, or class=[0,2,3]
retina_masks: False # use high-resolution segmentation masks
boxes: True # Show boxes in segmentation predictions
主要填写:
source # 源文件路径,可以是图片或视频
show # 是否展示图片或视频
classes # 显示哪些类别,类别在上文的 coco.yaml 中列出
例如:
yolo predict model=yolov8n.pt source=“https://ultralytics.com/images/bus.jpg” show classes=0


















暂无评论内容