
阅读提醒,本文以严谨为主,兼顾理解。
目标
介绍CNNs的基础结构和训练方法。
理解本文所需知识: 高中数学,高中语文
完全读懂本文所需知识: 微积分,线性代数
为了大众阅读,在英文第一次出现的时候,会有标注汉语。
概述
神经网络(neual networks)是人工智能研究领域的一部分,当前最流行的神经网络是深度卷积神经网络(deep convolutional neural networks, CNNs),虽然卷积网络也存在浅层结构,但是因为准确度和表现力等原因很少使用。目前提到CNNs和卷积神经网络,学术界和工业界不再进行特意区分,一般都指深层结构的卷积神经网络,层数从”几层“到”几十上百“不定。
CNNs目前在很多很多研究领域取得了巨大的成功,例如: 语音识别,图像识别,图像分割,自然语言处理等。虽然这些领域中解决的问题并不相同,但是这些应用方法都可以被归纳为:
CNNs可以自动从(通常是大规模)数据中学习特征,并把结果向同类型未知数据泛化。背景
半个世纪以前,图像识别就已经是一个火热的研究课题。
1950年中-1960年初,感知机吸引了机器学习学者的广泛关注。这是因为当时数学证明表明,如果输入数据线性可分,感知机可以在有限迭代次数内收敛[1]。感知机的解是超平面参数集,这个超平面可以用作数据分类。然而,感知机却在实际应用中遇到了很大困难,因为1)多层感知机暂时没有有效训练方法,导致层数无法加深,2)由于采用线性激活函数,导致无法处理线性不可分问题,比如“与或”。
这些问题随着后向传播(back propagation,BP)算法和非线性激活函数的提出得到解决。1989年,BP算法被首次用于CNN中处理2-D信号(图像)。
2012年,ImageNet挑战赛中CNN证明了它的实力,从此在图像识别和其他应用中被广泛采纳。
通过机器进行模式识别 ,通常可以被认为有四个阶段:
数据获取: 比如数字化图像预处理: 比如图像去噪和图像几何修正特征提取:寻找一些计算机识别的属性,这些属性用以描述当前图像与其它图像的不同之处数据分类:把输入图像划分给某一特定类别CNN是目前图像领域特征提取最好的方式,也因此大幅度提升了数据分类精度,我将在下文详细解释。
网络结构
基础的CNN由 卷积(convolution), 激活(activation), and 池化(pooling)三种结构组成。CNN输出的结果是每幅图像的特定特征空间。当处理图像分类任务时,我们会把CNN输出的特征空间作为全连接层或全连接神经网络(fully connected neural network, FCN)的输入,用全连接层来完成从输入图像到标签集的映射,即分类。当然,整个过程最重要的工作就是如何通过训练数据迭代调整网络权重,也就是后向传播算法。目前主流的卷积神经网络(CNNs),比如VGG, ResNet都是由简单的CNN调整,组合而来。
这些加粗名词将会在下文详细解释。
CNN
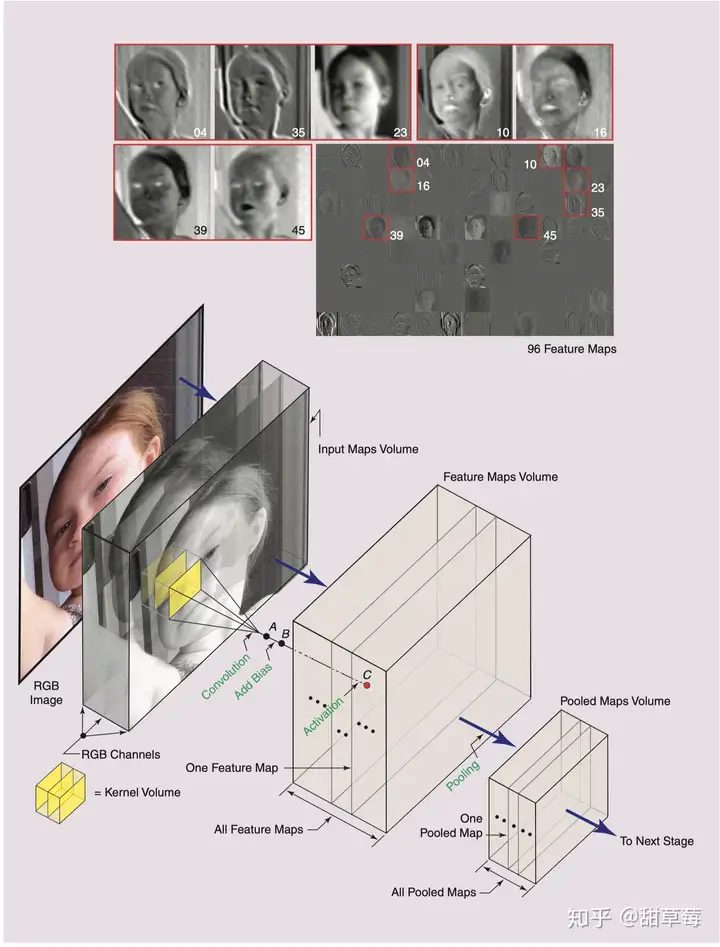
图1显示的是CNN的基础结构,现在大型深层的卷积神经网络(CNNs, 请注意这里是复数)通常由多个上述结构前后连接、层内调整组成,根据功能不同,我们称这些前后连接的结构处于不同阶段(stage)。虽然在主流CNNs中,不同stage里CNN会有不同的单元和结构,比如卷积核 (kernel)大小可能不同,激活函数(activition function) 可能不同,pooling操作可能不存在,但是图1的CNN结构应当能够包含所有的情况。
我们跟随图1来解释,一个stage中的一个CNN,通常会由三种映射空间组成(Maps Volume, 这里不确定是不是应该翻译为映射空间,或许映射体积会更准确),
输入映射空间(input maps volume)特征映射空间(feature maps volume)池化映射空间(pooled maps volume)例如图中,输入的是彩色RGB图像,那么输入的maps volume由红,黄,蓝三通道/三种map构成。我们之所以用input map volume这个词来形容,是因为对于多通道图像输入图像实际上是由高度,宽度,深度三种信息构成,可以被形象理解为一种”体积”。这里的“深度”,在RGB中就是3,红,黄,蓝三种颜色构成的图像,在灰度图像中,就是1。
卷积
CNN中最基础的操作是卷积convolution,再精确一点,基础CNN所用的卷积是一种2-D卷积。也就是说,kernel只能在x,y上滑动位移,不能进行深度 (跨通道) 位移。这可以根据图1来理解,对于图中的RGB图像,采用了三个独立的2-D kernel,如黄色部分所示,所以这个kernel的维度是 X×Y×3X\times Y \times 3 。在基础CNN的不同stage中,kernel的深度都应当一致,等于输入图像的通道数。
卷积需要输入两个参数,实质是二维空间滤波,滤波的性质与kernel选择有关,CNN的卷积是在一个2-D kernel 和输入的 2-D input map 之间,RGB中各图像通道分别完成。
我们假设单一通道输入图像的空间坐标为 (x,y)(x,y) ,卷积核大小是 p×qp \times q ,kernel权重为 ww ,图像亮度值是 vv ,卷积过程就是kernel 所有权重与其在输入图像上对应元素亮度之和,可以表示为,
convx,y=∑ip∗qwiviconv_{x,y} = \sum_i^{p*q}w_iv_i 。
我们可以用一个例子来说明,
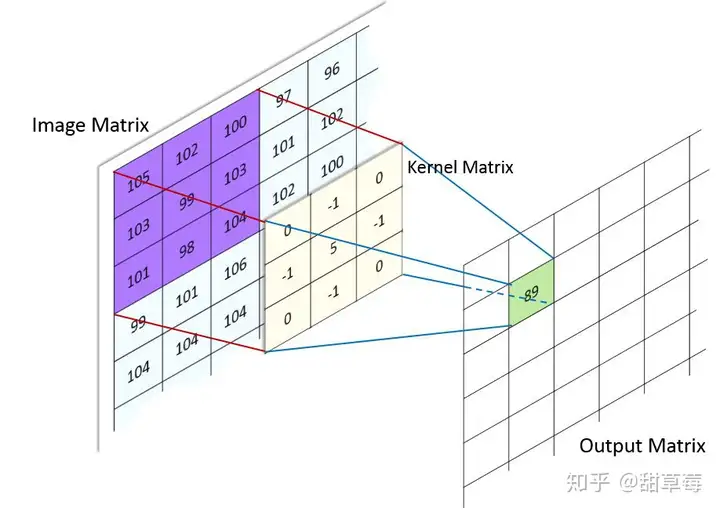
如上图所示,这时候输出的单一元素是
convx,y=105∗0+102∗(−1)+100∗0+103∗(−1)+99∗5+103∗(−1)+101∗0+98∗(−1)+104∗0=89conv_{x,y} = 105*0 + 102*(-1)+100*0+103*(-1)+99*5 +103*(-1)+101*0+98*(-1)+104*0\\ =89
并将kernel随(x,y)平移扫描,可以得到输出空间,这时假设输入图像大小是 512×512512 \times 512 ,卷积核是 3×33 \times 3 ,在不考虑零填充(zero padding)的情况,输出是 (512−3+1)=510×510.(512-3+1)=510 \times 510.
注意卷积层的kernel可能不止一个,扫描步长,方向也有不同,这些进阶方式可以归纳一下:
可以采用多个卷积核,设为n 同时扫描,得到的feature map会增加n个维度,通常认为是多抓取n个特征。可以采取不同扫描步长,比如上例子中采用步长为n, 输出是 ()(510/n,510/n)(510/n,510/n)padding,上例里,卷积过后图像维度是缩减的,可以在图像周围填充0来保证feature map与原始图像大小不变深度升降,例如采用增加一个1*1 kernel来增加深度,相当于复制一层当前通道作为feature map跨层传递feature map,不再局限于输入即输出, 例如ResNet跨层传递特征,Faster RCNN 的POI pooling激活
卷积之后,通常会加入偏置(bias), 并引入非线性激活函数(activation function),这里定义bias为b,activation function 是 h()h() ,经过激活函数后,得到的结果是,
zx,y=h(∑ip∗qwivi+b)z_{x,y}=h(\sum_i^{p*q}w_i v_i+b) .
这里请注意,bias不与元素位置相关,只与层有关。主流的activation function 有,
线性整流单元(ReLU): h(z)=max(0,z)h(z) = max (0,z)
根据实际参数大小等性质调整。
图1中feature maps volume的每个元素就是由 zx,yz_{x,y} 。我们可以回到图1的上半部分,这里的feature map是可以可视化的。为了保证阅读体验,我这里再把图1粘贴一遍,
例如采用277*277的RGB图像, 采用96个11*11*3的kernels同时扫描,很容易得到输出的feature maps是96个267*267的二维 feature map, 267*267是单个图像feature map的x,y轴大小,96是卷积核个数,原本的3通道在积分的时候会被作为一个元素加起来。 如上图,这些feature map可视化之后,可以看到4 和35表示边缘特征,23是模糊化的输入,10和16在强调灰度变化,39强调眼睛,45强调红色通道的表现。
池化
池化(pooling),是一种降采样操作(subsampling),主要目标是降低feature maps的特征空间,或者可以认为是降低feature maps的分辨率。因为feature map参数太多,而图像细节不利于高层特征的抽取。
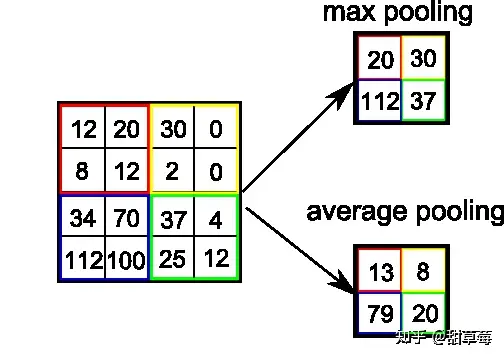
目前主要的pooling操作有:
最大值池化 Max pooling:如上图所示,2 * 2的max pooling就是取4个像素点中最大值保留平均值池化 Average pooling: 如上图所示, 2 * 2的average pooling就是取4个像素点中平均值值保留L2池化 L2 pooling: 即取均方值保留Pooling操作会降低参数,降低feature maps的分辨率,但是这种暴力降低在计算力足够的情况下是不是必须的,并不确定。目前一些大的CNNs网络只是偶尔使用pooling.
以上是一个CNN stage的基本结构,需要强调的是,这个结构是可变的,目前大部分网络都是根据基本结构堆叠调整参数,或跳层连接而成。CNN的输出是feature maps,它不仅仅可以被输入全连接网络来分类,也可以接入另外一个“镜像”的CNN,如果输入图像维度与这个新的CNN输出feature maps特征维度相同,即这个新接入的CNN在做上采样, upsampling, 得到的图像可以认为是在做像素级的标注,图像分割[2]。
全连接网络
出现在CNN中的全连接网络(fully connected network)主要目的是为了分类, 这里称它为network的原因是,目前CNNs多数会采用多层全连接层,这样的结构可以被认为是网络。如果只有一层,下边的叙述同样适用。它的结构可能如下图所示:
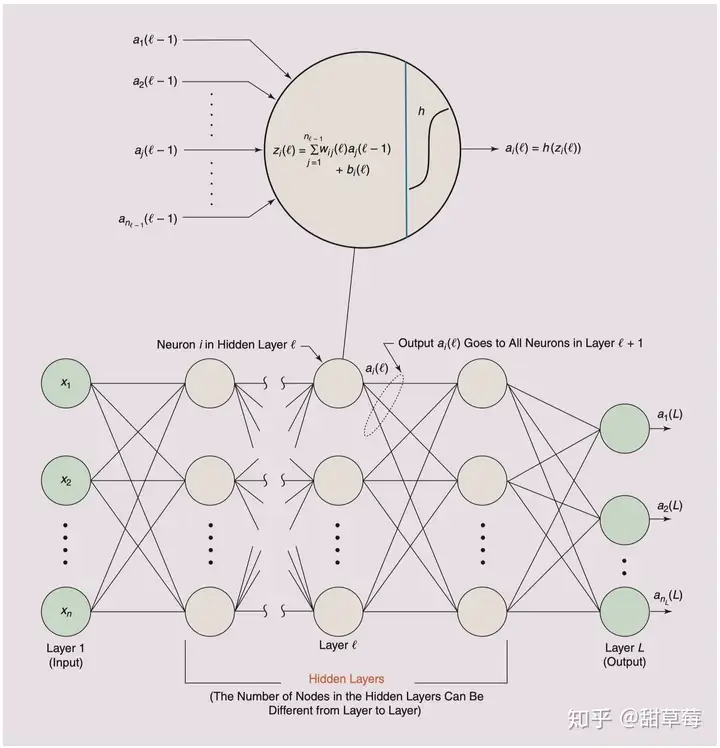
不同于CNN的滑动卷积,全连接网络每一层的所有单元与上一层完全连接。通常,除了输入层和输出层的其他层,都被认为是隐含层。如图2所示,对于第 ll 层的第 ii 个神经元,它的输出计算方式是,
zi(l)=∑j=inl−1wij(l)aj(l−1)+bi(l),z_i(l)=\sum_{j=i}^{n_{l-1}}w_{ij}(l)a_j(l-1)+b_i(l),
考虑activation function之后,对于第 ll 层的第 ii 个神经元,输出是
ai(l)=h(zi(l)).a_i{(l)}=h(z_i(l)).
计算这一层中的所有神经元之后, 作为下一层的输入。
全连接网络和CNN的数学表达结构其实很相似,只是不存在关于图像空间上的滑动卷积。
目标函数与训练方法(数学高能预警)
CNN网络的训练误差需要通过一个目标函数来衡量,目前比较流行的目标函数是均方误差(Mean Square Error)和K-L散度(K-L divergence),对于输出层的误差公式很容易判断:
MSE: E=12∑j=1nL(rj−aj(L))2,E = \frac{1}{2}\sum_{j=1}^{n_L}(r_j-a_j(L))^2, —————————-(1)K-L divergence : E=−1nL∑j=1nL[rjlnaj(L)+(1−rj)ln(1−aj(L))]E = – \frac{1}{n_L}\sum_{j=1}^{n_L}[r_j\ln a_j(L)+(1-r_j)\ln(1-a_j(L))]其中 rjr_j 是期望输出(标注标签), aj(L)a_j(L) 是第 LL 层的第 jj 个神经元的输出。
K-L divergence 和MSE原理本文不再过多介绍,通常K-L divergence的权重更新会比MSE更快,不过本文将通过MSE来举例说明,
如果我们仅仅考虑最后一层的更新,通过梯度下降,权重 wijw_{ij} 和 bib_i 的更新方式把 aj(L)a_j(L) 代入公式求导就可以算出,
wij(l):=wij(l)−α∇E∇wij(l)w_{ij}(l):=w_{ij}(l)-\alpha\frac{\nabla E}{\nabla w_{ij}(l)} 和 bi(l):=bi(l)−α∇E∇bi(l)b_{i}(l):=b_{i}(l)-\alpha\frac{\nabla E}{\nabla b_{i}(l)} —(6)
其中 α\alpha 是learning rate, 如果learning rate 取值过大,可能会收敛于震荡,如果learning rate取值过小,可能收敛速度太慢。
以上是如果网络只有最后一层的训练方式,但是实际上对于深层网络,我们很难一次通过数学计算出每一层的权重更新公式,也就是权重很难更新。
可以看出,如果想要训练网络,就需要根据误差更新权重,而如果想要获得误差 EE ,不论是MSE,还是K-L divergence, 都需要两种参数:期望输出 rr ,和当前层权重 aa (回顾公式,即 w,bw,b )。其中期望输出 rr 来自标签集,很容易获得,而 aa 和误差 EE 相互影响。那么,解决方式就很明显,我们可以先固定一方,更新另一方,这是alternating optimazition优化多参数模型的经典思路。CNN的训练方法思路也来自于此,被称作backpropagation。
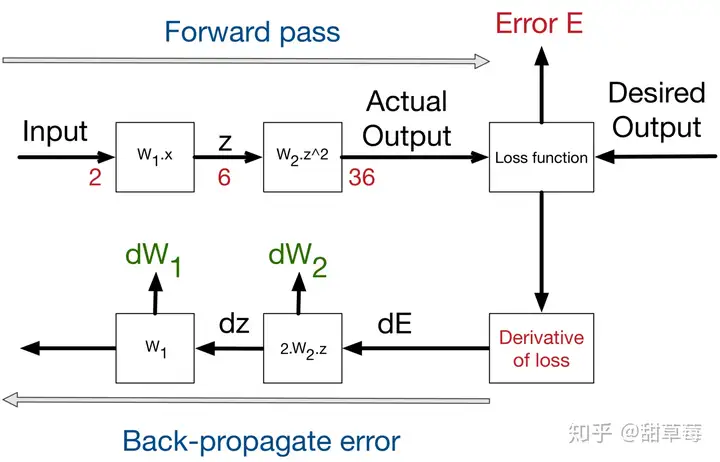
Backpropagation算法,大概可以分为两步:
1. 通过训练数据计算网络中的所有 aa ,这里可以回想一下 aa 的计算方法,最初的 aa 只需要输入图像和初始化权重就可以计算,这一步是从输入图像到输出层的计算,即上图中的前向传播。
2. 获得所有 aa 之后,再我们就可以通过目标函数和期望输出计算出最后一层的 EE ,而有了最后一层的 EE ,可以计算出倒数第二层的期望输出 rr ,以此类推,可以计算误差到第一层,并通过求导更新权重。这是上图的后向误差传播(这里表述不严谨)。
上述1,2部操作会交替进行。
实际上BP算法通过以下四个公式更新:
∇E∇wij(l)=aj(l−1)Δi(l)\frac{\nabla{E}}{\nabla{w}_{ij}(l)} = {a}_{j}(l-{1}){\Delta}_{i}(l) ———(2)
∇E∇bi(l)=Δi(l)\frac{\nabla{E}}{\nabla{b}_{i}(l)} = {\Delta}_{i}(l) ———–(3)
Δj(l)=h′(zj(l))∑iwij(ℓ+1)Δi(l+1)\Delta_j(l) = {h}\left({z}_{j}(l)\right)\mathop{\sum}\limits_{i}{w}_{ij}(\ell + {1}){\Delta}_{i}(l+ {1}) ——–(4)
Δj(L)=h′(zj(L))[aj(L)−rj]\Delta_j({L}) = {h}({z}_{j}(L))[{a}_{j}({L})-{r}_{j}] ———–(5)
(2)和(3)用来计算更新权重 wi,jw_{i,j} 和bias bib_i 的所需的梯度(请往上回顾一下单层权重更新部分)
(4)和(5)是(2)和(3)中未知项的来源,(5)用来计算最后一层梯度,(4)用来计算除最后一层外其他层的梯度,并通过传播梯度来传递误差,其中activition function的梯度 h′(zj(l)),l=1,…,L {h}({z}_{j}(l)),l=1,…,L 和各层权重 ai(l),l=1,…,La_i(l), l=1,…,L 都可以在前向传播过程中计算出来。
严谨的BP算法流程:
1. 用随机小数初始化所有权重 wi,jw_{i,j} 和bias bib_i ;
2. 利用来自训练集的输入向量(例如一副图像),算出所有的 aj(l)a_j(l) 和 h′(zj(l)) {h}({z}_{j}(l))
3.用公式(1)计算 MSE或K-L divergence
4. 用(5)计算 \Delta_j({L}) , 并后向传播,用(4)计算出所有其他层的 \Delta_j(l) , l=L-1,L-2,….,2
5. 利用(6)更新权重
6. 对训练集中的所有输入向量(图像)重复 2-5,完成一次所有训练成为一个epoch。当MSE误差稳定不变,或者到达某个迭代次数后,BP算法停止。
这就是CNNs的训练过程。
完。
[1] F. Rosenblatt, “Two theorems of statistical separability in the perceptron,” in Proc. Symp. No. 10 Mechanisation Thought Processes, London, 1959, vol. 1, pp. 421–456.
[2] E. Shelhamer, J. Long, and T. Darrell, “Fully convolutional networks for semantic segmentation,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 39, no. 4, pp. 640–651, 2017.
[3] Gonzalez R C. Deep Convolutional Neural Networks [Lecture Notes][J]. IEEE Signal Processing Magazine, 2018, 35(6): 79-87.
[4] Y. LeCun, Y. Bengio, and G. E. Hinton, “Deep learning,” Nature, vol. 521, pp. 436–444, May, 2015.
[5] Y. LeCun, B. Boser, J. S. Denker D. Henderson,R. E. Howard, W. Hubbard, and L. D. Jackel, “Backpropagation applied to handwritten zip code recognition,” Neural Comput., vol. 1, no. 4, pp. 541–551, 1989.
















暂无评论内容